
soon…
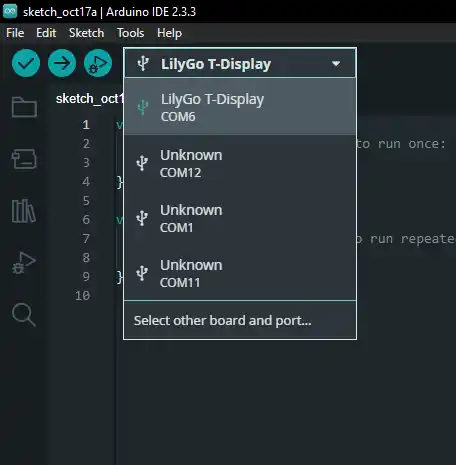
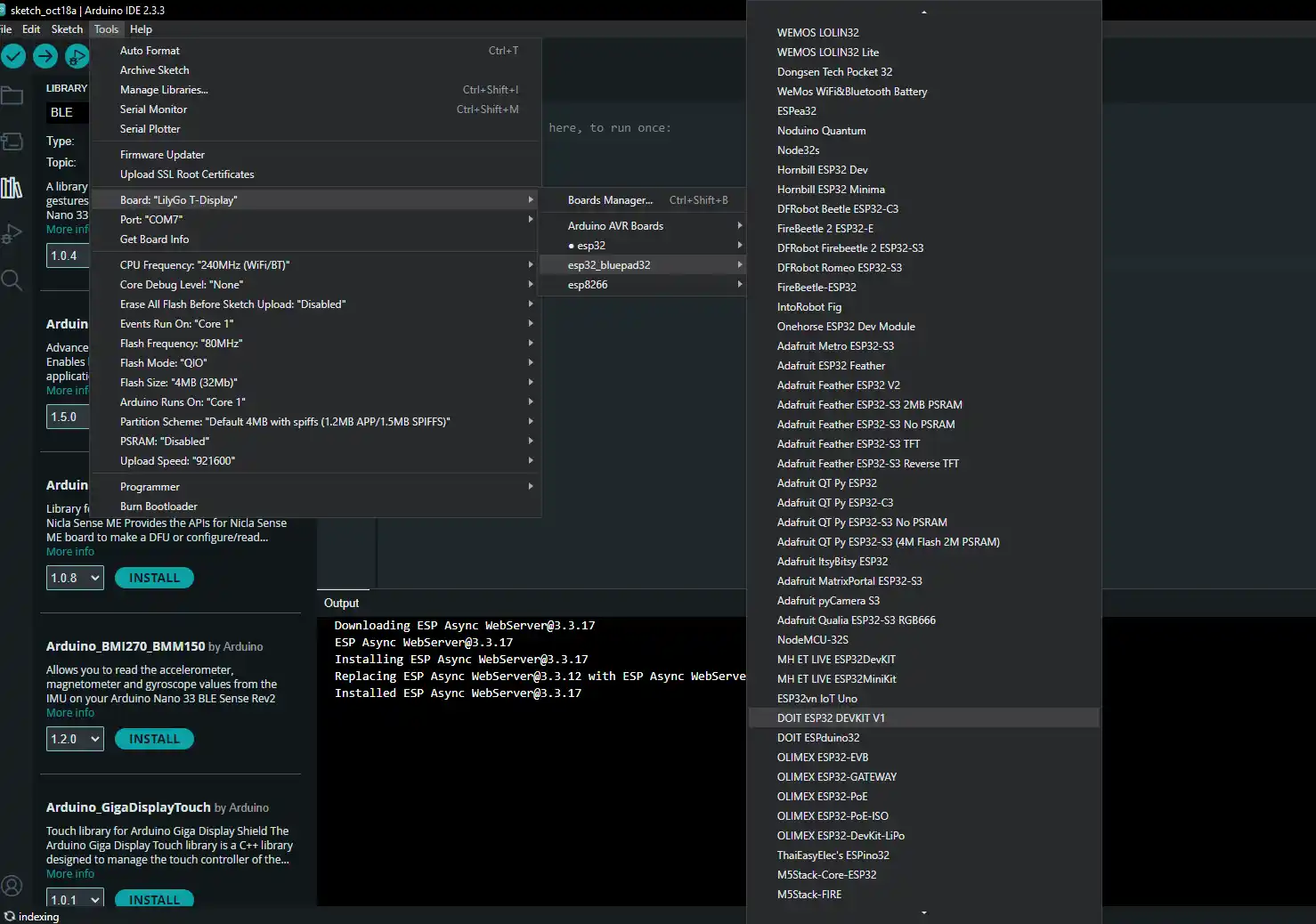
You’ll learn how to use a ESP32-WROOM as a Bluetooth receiver for a PS4 Controller to control any RC Car.
It’s incredibly easy.
Buy the parts needed:
- PS4 Controller……………..………………….… Amazon / Banggood
- ESP32 Wroom 30 pins…………….…….… Amazon / Banggood
- RC Car Wltoys K989……………………….… Amazon / Banggood / Shopee
- Brushed ESC 10A with brakes.…….… Amazon / Banggood
- Thin wires 22 Awg (optional) ………… Amazon / Banggood
- JST 2 Conectors (optional).………..….… Amazon / Banggood
Disclosure: These are affiliate links. I earn a little comission if you use my links to buy the parts.
Please use them to help me continue building cool projects.
3D Print the parts
If you got the same car, you can just download and print the parts to attatch it to your car.
Otherwise you’ll have to design a part to fit your car. If you do, please let me know so i can link it here.
Use the same screws on the frame to attach the prints.
How to connect the wires
Wiring Diagram Overview:
Let’s break down the wiring based on the schematic provided.
Servo:
- Servo SIG (Orange Wire): Pin 12
- VCC (Red Wire): 5V
- GND (Black Wire): GND
ESC:
- ESC SIG (White Wire): Pin 13
- VCC (Red Wire): 5V
- GND (Black Wire): GND
Power:
Connect your ESP32 to 5V and GND to power it.
{kind=link}
{kind=link}
{kind=link}
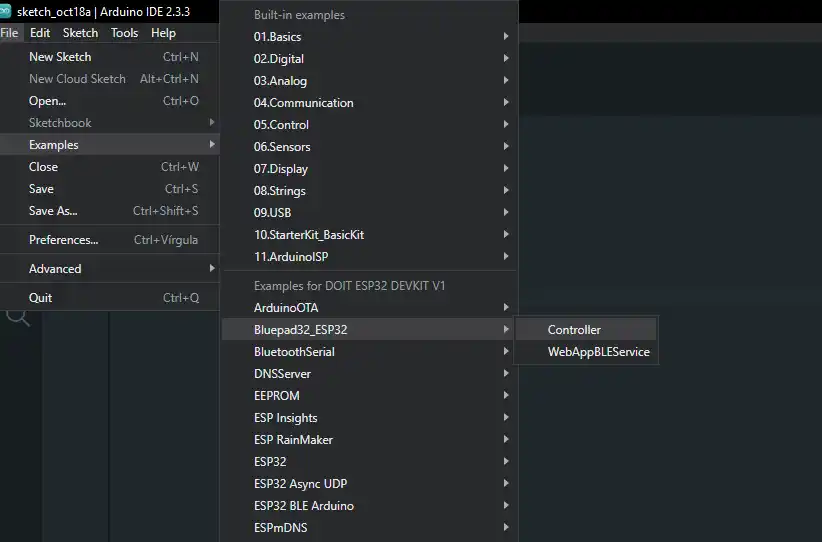
Get the Modified Arduino Code
#include <Bluepad32.h>
#include <ESP32Servo.h>
const int servoPin = 12; // yellow wire
const int escPin = 13; // white wire
Servo servo1;
Servo esc;
// ================= LED VALUES =========================
bool copLightsActive, lightActive = false; // LED state
bool escAlreadySet = false;
bool previousButtonState = HIGH; // Previous button state
const int ledBrakePin = 14;
const int ledHeadlightPin = 27;
// ================= PEDALS VALUES =========================
int throttleValue, brakeValue, escValue, servoValue, panValue, tiltValue, gyroValue, accelValue;
int escSlowSpeed = 200; // int escSlowSpeed = 1700;
int escNormalSpeed = 300; // int escNormalSpeed = 1800;
int escMaxSpeed = 500; // int escMaxSpeed = 2000;
// ================= NITRO VALUES =========================
int nitroAmmo = 1;
int nitroDuration = 5000; // 5 seconds
unsigned long nitroStartTime = 0;
bool nitroActivated = false; // 1==false ; 0==true;
// ================= GUN VALUES =========================
int gunAmmo = 1;
int gunDuration = 3000; // 3 seconds
unsigned long gunStartTime = 0;
bool gunActivated = false;
// ================= HORN VALUES =========================
int hornAmmo = 1;
int hornDuration = 3000; // 3 seconds
unsigned long hornStartTime = 0;
bool hornActivated = false;
// ================= BUTTON PRESSED VALUES =========================
// Define global variables
float value = 100.0; // Initial value (100%)
unsigned long lastSubtractTime = 0; // Time tracker for subtracting
unsigned long lastAddTime = 0; // Time tracker for adding
unsigned long buttonReleaseTime = 0;// Time when the button was released
bool buttonHeld = false; // Whether the button is held
bool buttonReleased = false; // Whether the button was released
bool addingActive = false;
// Array of values
int values[] = {10, 20, 30, 40, 50};
int arrayLength = sizeof(values) / sizeof(values[0]); // Calculate the array length
int currentIndex = 0; // Start at the first value in the array
ControllerPtr myControllers[BP32_MAX_GAMEPADS];
// This callback gets called any time a new gamepad is connected.
// Up to 4 gamepads can be connected at the same time.
void onConnectedController(ControllerPtr ctl) {
bool foundEmptySlot = false;
for (int i = 0; i < BP32_MAX_GAMEPADS; i++) {
if (myControllers[i] == nullptr) {
Serial.printf("CALLBACK: Controller is connected, index=%d\n", i);
// Additionally, you can get certain gamepad properties like:
// Model, VID, PID, BTAddr, flags, etc.
ControllerProperties properties = ctl->getProperties();
Serial.printf("Controller model: %s, VID=0x%04x, PID=0x%04x\n", ctl->getModelName().c_str(), properties.vendor_id, properties.product_id);
myControllers[i] = ctl;
foundEmptySlot = true;
break;
}
}
if (!foundEmptySlot) {
Serial.println("CALLBACK: Controller connected, but could not found empty slot");
}
}
void onDisconnectedController(ControllerPtr ctl) {
bool foundController = false;
for (int i = 0; i < BP32_MAX_GAMEPADS; i++) {
if (myControllers[i] == ctl) {
Serial.printf("CALLBACK: Controller disconnected from index=%d\n", i);
myControllers[i] = nullptr;
foundController = true;
break;
}
}
if (!foundController) {
Serial.println("CALLBACK: Controller disconnected, but not found in myControllers");
}
}
// ========= SEE CONTROLLER VALUES IN SERIAL MONITOR ========= //
void dumpGamepad(ControllerPtr ctl) {
Serial.printf(
"idx=%d, dpad: 0x%02x, buttons: 0x%04x, axis L: %4d, %4d, axis R: %4d, %4d, brake: %4d, throttle: %4d, "
"misc: 0x%02x, gyro x:%6d y:%6d z:%6d, accel x:%6d y:%6d z:%6d\n",
ctl->index(), // Controller Index
ctl->dpad(), // D-pad
ctl->buttons(), // bitmask of pressed buttons
ctl->axisX(), // (-511 - 512) left X Axis
ctl->axisY(), // (-511 - 512) left Y axis
ctl->axisRX(), // (-511 - 512) right X axis
ctl->axisRY(), // (-511 - 512) right Y axis
ctl->brake(), // (0 - 1023): brake button
ctl->throttle(), // (0 - 1023): throttle (AKA gas) button
ctl->miscButtons(), // bitmask of pressed "misc" buttons
ctl->gyroX(), // Gyro X
ctl->gyroY(), // Gyro Y
ctl->gyroZ(), // Gyro Z
ctl->accelX(), // Accelerometer X
ctl->accelY(), // Accelerometer Y
ctl->accelZ() // Accelerometer Z
);
}
// ========= GAME CONTROLLER ACTIONS SECTION ========= //
void processGamepad(ControllerPtr ctl) {
// There are different ways to query whether a button is pressed.
// By query each button individually:
// a(), b(), x(), y(), l1(), etc...
//== PS4 X button = 0x0001 ==//
if (ctl->buttons() == 0x0001) {
// code for when X button is pushed
checkNitroButton();
}
if (ctl->buttons() != 0x0001) {
// code for when X button is released
}
//== PS4 Square button = 0x0004 ==//
if (ctl->buttons() == 0x0004) {
// code for when square button is pushed
checkGunButton();
}
if (ctl->buttons() != 0x0004) {
// code for when square button is released
}
//== PS4 Triangle button = 0x0008 ==//
if (ctl->buttons() == 0x0008) {
checkHornButton();
// code for when triangle button is pushed
}
if (ctl->buttons() != 0x0008) {
// code for when triangle button is released
}
//== PS4 Circle button = 0x0002 ==//
if (ctl->buttons() == 0x0002) {
// code for when circle button is pushed
checkHornButton();
}
if (ctl->buttons() != 0x0002) {
// code for when circle button is released
}
//== PS4 Share miscButtons = 0x02 ==//
if (ctl->miscButtons() == 0x02) {
// code for when Share button is pushed
Serial.print("Share button is pushed ");
}
//== PS4 Option miscButtons = 0x04 ==//
if (ctl->miscButtons() == 0x04) {
// code for when Option button is pushed
Serial.print("Option button is pushed ");
}
//== PS4 PS miscButtons = 0x01 ==//
if (ctl->miscButtons() == 0x01) {
// code for when PS button is pushed
Serial.print("PS button is pushed ");
}
//== PS4 Dpad UP button = 0x01 ==//
if (ctl->dpad() == 0x01) {
// code for when dpad up button is pushed
escValue = 2000;
}
if (ctl->dpad() != 0x01) {
// code for when dpad up button is released
escValue = 1500;
}
//==PS4 Dpad DOWN button = 0x02==//
if (ctl->dpad() == 0x02) {
// code for when dpad down button is pushed
escValue = 1000;
}
if (ctl->dpad() != 0x02) {
// code for when dpad down button is released
escValue = 1500;
}
//== PS4 Dpad LEFT button = 0x08 ==//
if (ctl->dpad() == 0x08) {
// code for when dpad left button is pushed
servoValue = 0;
}
if (ctl->dpad() != 0x08) {
// code for when dpad left button is released
servoValue = 90;
}
//== PS4 Dpad RIGHT button = 0x04 ==//
if (ctl->dpad() == 0x04) {
// code for when dpad right button is pushed
servoValue = 180;
}
if (ctl->dpad() != 0x04) {
// code for when dpad right button is released
servoValue = 90;
}
//== PS4 R1 trigger button = 0x0020 ==//
if (ctl->buttons() == 0x0020) {
// code for when R1 button is pushed
}
if (ctl->buttons() != 0x0020) {
// code for when R1 button is released
}
//== PS4 R2 trigger button = 0x0080 ==//
if (ctl->throttle() >= 25) {
// code for when R2 button is pushed
if (nitroActivated == true){
throttleValue = map(ctl->throttle(), 0, 1023, 0, escMaxSpeed);
}else{
throttleValue = map(ctl->throttle(), 0, 1023, 0, escNormalSpeed);
}
Serial.print("throttleValue: ");
Serial.println(throttleValue);
}
if (ctl->throttle() < 25) {
// code for when R2 button is released
throttleValue = 0;
}
//== PS4 L1 trigger button = 0x0010 ==//
if (ctl->buttons() == 0x0010) {
// code for when L1 button is pushed
toggleLED();
}
if (ctl->buttons() != 0x0010) {
// code for when L1 button is released
}
//== PS4 L2 trigger button = 0x0040 ==//
if (ctl->brake() >= 25) {
// code for when L2 button is pushed
brakeValue = map(ctl->brake(), 0, 1023, 0, 500);
Serial.print("brakeValue: ");
Serial.println(brakeValue);
}
if (ctl->brake() < 25) {
// code for when L2 button is released
brakeValue = 0;
}
//== LEFT JOYSTICK - UP ==//
if (ctl->axisY() <= -25) {
// code for when left joystick is pushed up
}
//== LEFT JOYSTICK - DOWN ==//
if (ctl->axisY() >= 25) {
// code for when left joystick is pushed down
}
//== LEFT JOYSTICK - LEFT/RIGHT ==//
if (ctl->axisX()) {
// code for when left joystick is pushed left
servoValue = map(ctl->axisX(), -512, 512, 0, 180);
Serial.print("servoValue: ");
Serial.println(servoValue);
}
//== LEFT JOYSTICK - LEFT ==//
if (ctl->axisX() <= -25) {
// code for when left joystick is pushed left
}
//== LEFT JOYSTICK - RIGHT ==//
if (ctl->axisX() >= 25) {
// code for when left joystick is pushed right
}
//== LEFT JOYSTICK - LEFT ==//
if (ctl->gyroY()) {
// code for when left joystick is pushed left
gyroValue = map(ctl->gyroY(), -512, 512, 0, 180);
Serial.print("gyroValue: ");
Serial.println(gyroValue);
}
if (ctl->accelY()) {
// code for when left joystick is pushed left
accelValue = map(ctl->accelY(), -512, 512, 0, 180);
Serial.print("accelValue: ");
Serial.println(accelValue);
}
//== LEFT JOYSTICK DEADZONE ==//
if (ctl->axisY() > -25 && ctl->axisY() < 25 && ctl->axisX() > -25 && ctl->axisX() < 25) {
// code for when left joystick is at idle
// escValue = 1500;
}
//== RIGHT JOYSTICK - X AXIS ==//
if (ctl->axisRX()) {
// code for when right joystick moves along x-axis
panValue = map(ctl->axisRX(), -512, 512, 0, 180);
// Serial.print("panValue: ");
// Serial.println(panValue);
}
//== RIGHT JOYSTICK - Y AXIS ==//
if (ctl->axisRY()) {
// code for when right joystick moves along y-axis
tiltValue = map(ctl->axisRY(), -512, 512, 0, 180);
// Serial.print("tiltValue: ");
// Serial.println(tiltValue);
}
//== RIGHT JOYSTICK DEADZONE ==//
if (ctl->axisRY() > -25 && ctl->axisRY() < 25 && ctl->axisRX() > -25 && ctl->axisRX() < 25) {
// code for when left joystick is at idle
}
// Mix both pedal values before sending to the ESC and make sure it's in range
escValue = constrain((1500 + throttleValue - brakeValue), 1000, 2000);
// if (escValue >= 1450 && escValue <= 1550 ){ escValue = 1500; } //make it smoother
esc.writeMicroseconds(escValue);
servo1.write(servoValue);
// if the car is going backwards, light up the tail lights
if (escValue < 1450) {
digitalWrite(ledBrakePin, HIGH);
}else{
digitalWrite(ledBrakePin, LOW);
}
dumpGamepad(ctl);
}
void processControllers() {
for (auto myController : myControllers) {
if (myController && myController->isConnected() && myController->hasData()) {
if (myController->isGamepad()) {
processGamepad(myController);
}
else {
Serial.println("Unsupported controller");
}
}
}
}
// Arduino setup function. Runs in CPU 1
void setup() {
Serial.begin(115200);
servo1.attach(servoPin);
esc.attach(escPin);
pinMode(ledHeadlightPin, OUTPUT);
pinMode(ledBrakePin, OUTPUT);
digitalWrite(ledBrakePin, LOW);
digitalWrite(ledHeadlightPin, LOW);
Serial.printf("Firmware: %s\n", BP32.firmwareVersion());
const uint8_t* addr = BP32.localBdAddress();
Serial.printf("BD Addr: %2X:%2X:%2X:%2X:%2X:%2X\n", addr[0], addr[1], addr[2], addr[3], addr[4], addr[5]);
// Setup the Bluepad32 callbacks
BP32.setup(&onConnectedController, &onDisconnectedController);
// "forgetBluetoothKeys()" should be called when the user performs
// a "device factory reset", or similar.
// Calling "forgetBluetoothKeys" in setup() just as an example.
// Forgetting Bluetooth keys prevents "paired" gamepads to reconnect.
// But it might also fix some connection / re-connection issues.
BP32.forgetBluetoothKeys();
// Enables mouse / touchpad support for gamepads that support them.
// When enabled, controllers like DualSense and DualShock4 generate two connected devices:
// - First one: the gamepad
// - Second one, which is a "virtual device", is a mouse.
// By default, it is disabled.
BP32.enableVirtualDevice(false);
}
// Arduino loop function. Runs in CPU 1.
void loop() {
// This call fetches all the controllers' data.
// Call this function in your main loop.
bool dataUpdated = BP32.update();
if (dataUpdated)
processControllers();
// The main loop must have some kind of "yield to lower priority task" event.
// Otherwise, the watchdog will get triggered.
// If your main loop doesn't have one, just add a simple `vTaskDelay(1)`.
// Detailed info here:
// https://stackoverflow.com/questions/66278271/task-watchdog-got-triggered-the-tasks-did-not-reset-the-watchdog-in-time
vTaskDelay(1);
// delay(150);
}
void setupESC() {
Serial.print("setupESC triggered ");
// this is so this code run only once.
if (escAlreadySet == false) {
esc.writeMicroseconds(1500); delay(500);
esc.writeMicroseconds(2000); delay(1000);
esc.writeMicroseconds(1500); delay(500);
esc.writeMicroseconds(1000); delay(1000);
esc.writeMicroseconds(1500); delay(500);
esc.writeMicroseconds(1000); delay(1000);
esc.writeMicroseconds(1500);
escAlreadySet = true;
}
};
void toggleLED() {
Serial.print("toggleLED triggered ");
// Read the current button state
bool currentButtonState = digitalRead(ledHeadlightPin);;
// Check if the button is pressed and released
if (previousButtonState == HIGH && currentButtonState == LOW) {
// Toggle the LED state
lightActive = !lightActive;
// Set the LED to the new state
digitalWrite(ledHeadlightPin, lightActive ? HIGH : LOW);
}
// Update the previous button state for the next loop
previousButtonState = currentButtonState;
}
void checkNitroButton() {
Serial.print("checkNitroButton triggered ");
if (!nitroActivated) {
// Button pressed and nitro is not currently in use
nitroStartTime = millis(); // Record the time when nitro was activated
nitroActivated = true;
nitroAmmo--;
}
// Check if X seconds have passed since nitro was activated
if (nitroActivated && (millis() - nitroStartTime >= nitroDuration)) {
nitroActivated = false;
}
};
void checkGunButton() {
Serial.print("checkGunButton triggered ");
if (!gunActivated) {
// Button pressed and gun is not currently in use
gunStartTime = millis(); // Record the time when gun was activated
gunActivated = true;
gunAmmo--;
}
// Check if X seconds have passed since gun was activated
if (gunActivated && (millis() - gunStartTime >= gunDuration)) {
gunActivated = false;
}
};
void checkHornButton() {
Serial.print("checkHornButton triggered ");
if (!hornActivated) {
// Button pressed and nitro is not currently in use
hornStartTime = millis(); // Record the time when nitro was activated
hornActivated = true;
hornAmmo--;
}
// Check if X seconds have passed since nitro was activated
if (hornActivated && (millis() - hornStartTime >= hornDuration)) {
hornActivated = false;
}
};