
In this tutorial you’ll learn how to make a custom Lap Counter for 1:28 scale RC Cars using Wemos D1 Mini and Infrared LEDs and Infrared Receivers. With a free 3D printable Gate.
For this to work you’ll need to configure a few things:
- The IR Transmitter for your RC Car
- The IR Receivers on the Lap Gate
- A local MQTT broker and a local WebServer to receive messages from the boards.
- The Race Server Webpage to show the lap times and positions and other cool stuff.
Buy the parts needed:
- Wemos D1 Mini …………………………. Amazon / Banggood / Shopee
- Arduino Nano ……………………………. Amazon / Banggood / Shopee
- IR LEDs and Receivers …………..…..… Amazon / Banggood / Shopee
- 2N2222 Transistors …………..….…..… Amazon / Banggood
- 470 Ohm Resistors ……………………… Amazon / Banggood
- Breadboard Kit …………………………… Amazon / Banggood
Disclosure: These are affiliate links. I earn a little comission if you use my links to buy the parts.
Please use them to help me continue building cool projects.
Step1: Download all the files for this project
I wish everyone made things easy like this.
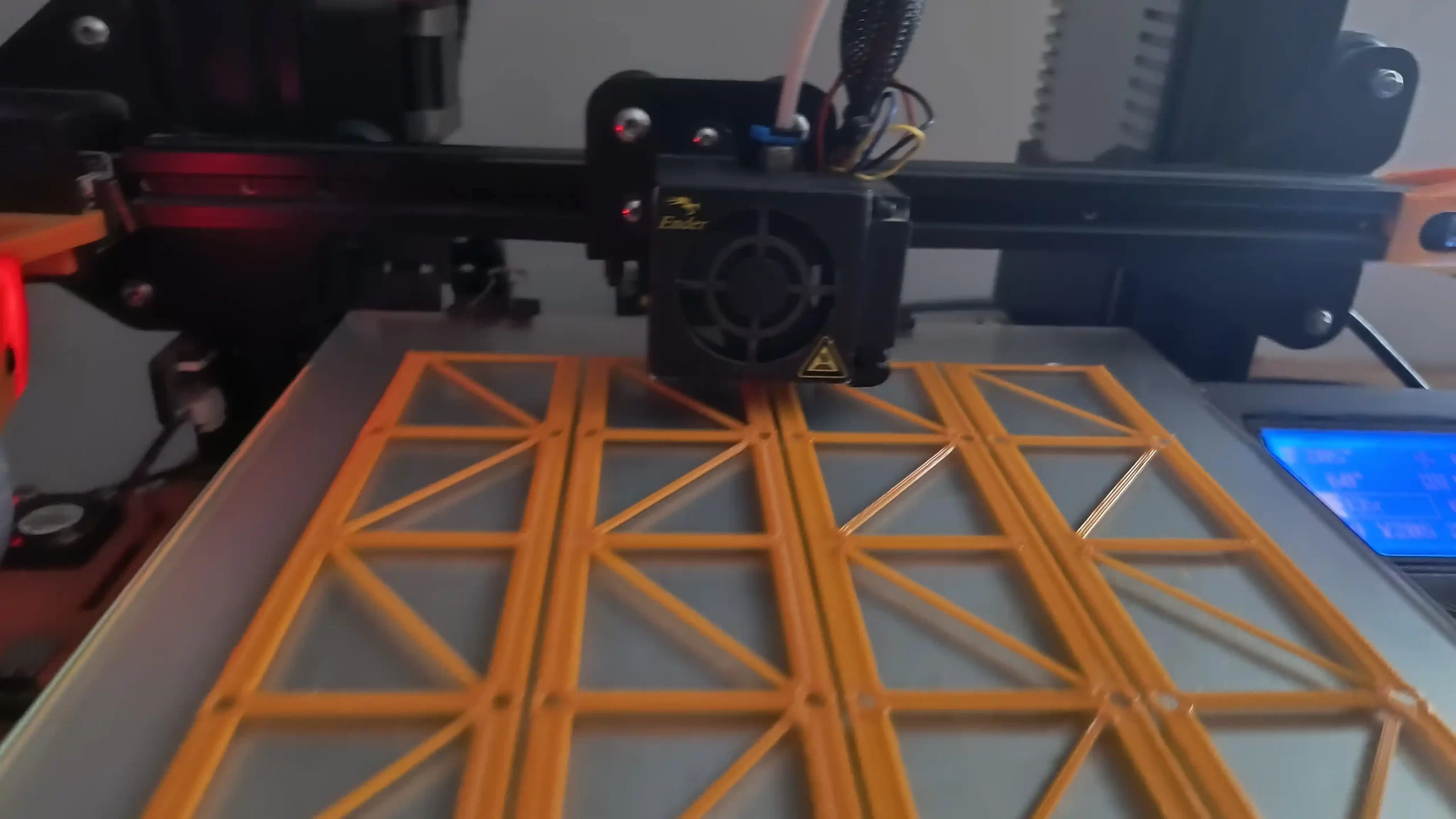
Step2: 3D Print the gates
Start printing the gates, and while waiting for it to finish let’s do the other stuff.
To build a Lap Gate for a 1:28 scale RC Car i’ve printed:
- 14x top-bottom.stl
- 14x sides.stl
- 2x corners.stl
- 5x top-covers.stl
- 1x corner-cover.stl
- 10x side-panel-base+checkered.stl
See how to assemble on step9.
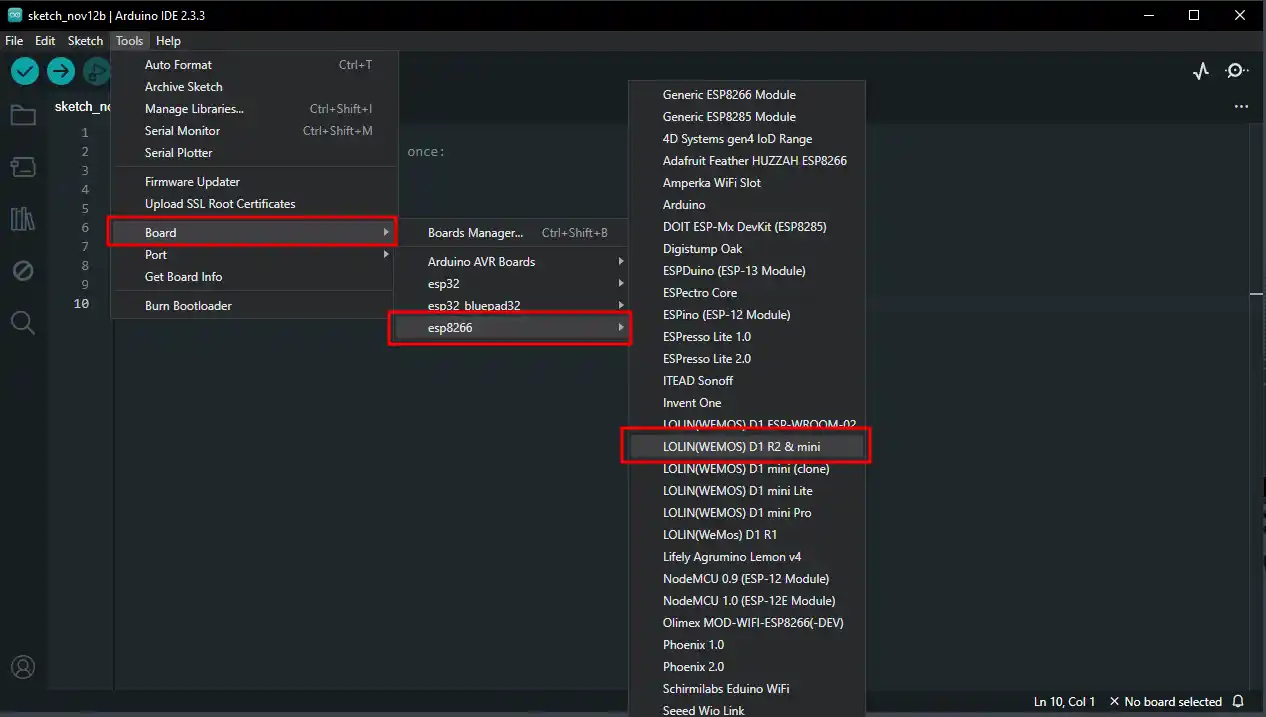
Step3: Install the Wemos Board on the Arduino IDE
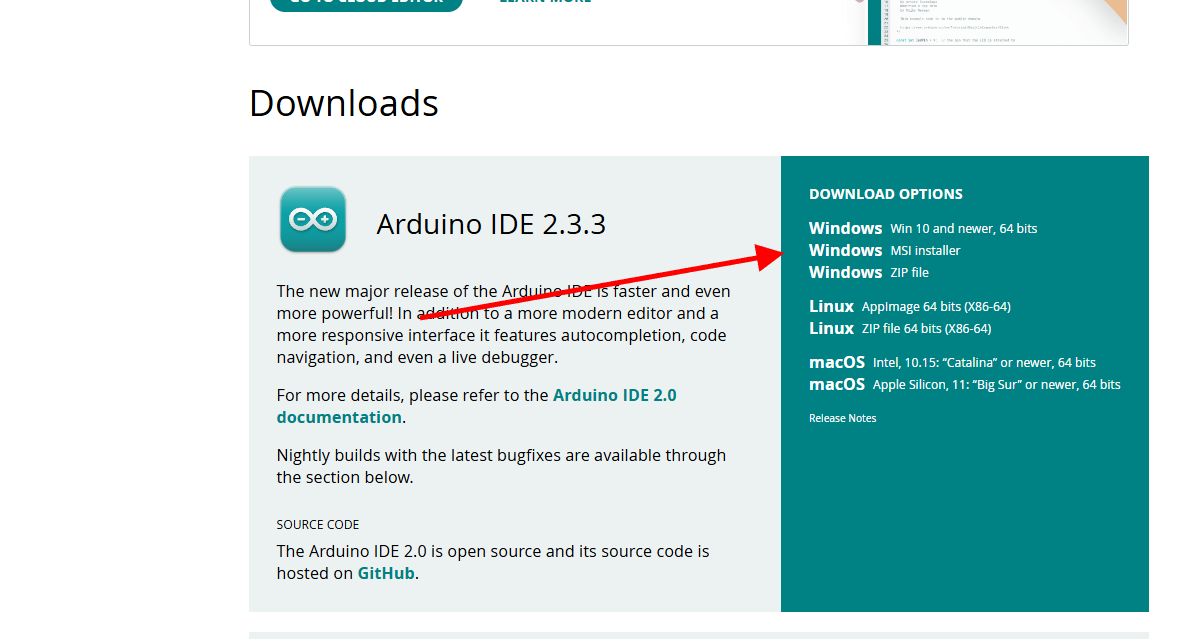
Download and install the Arduino IDE.
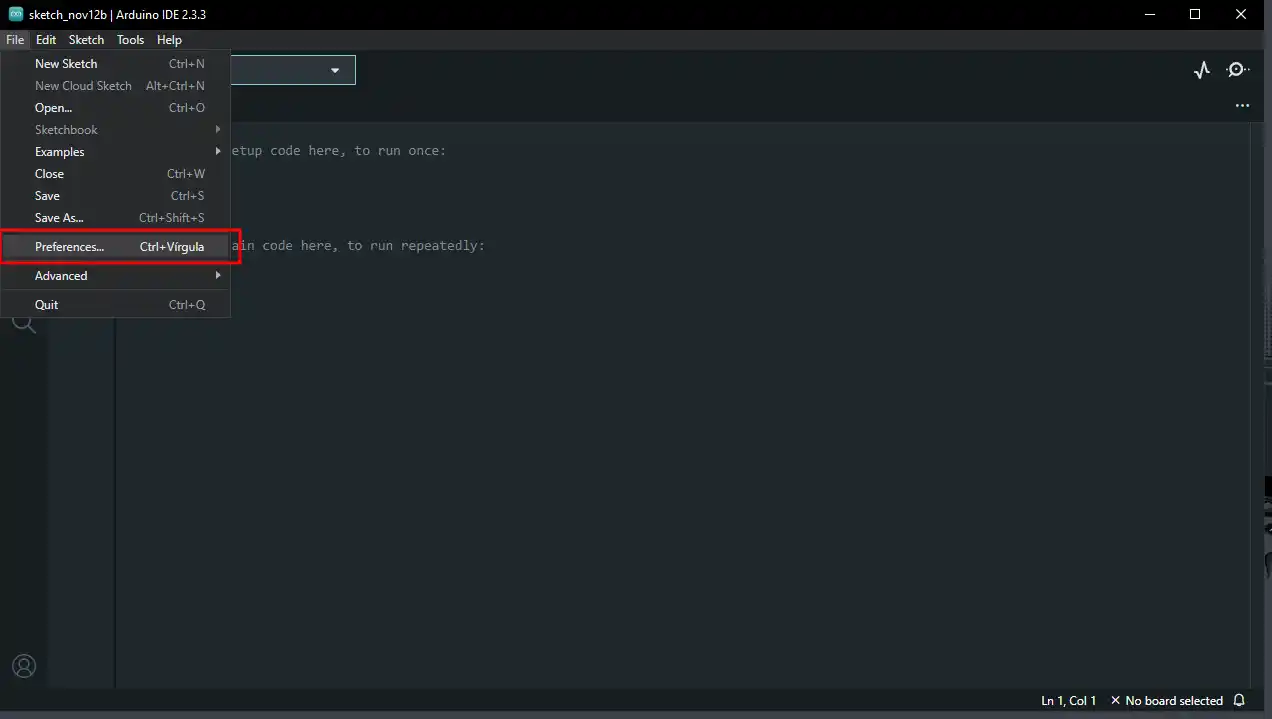
Access the menu File > Preferences.
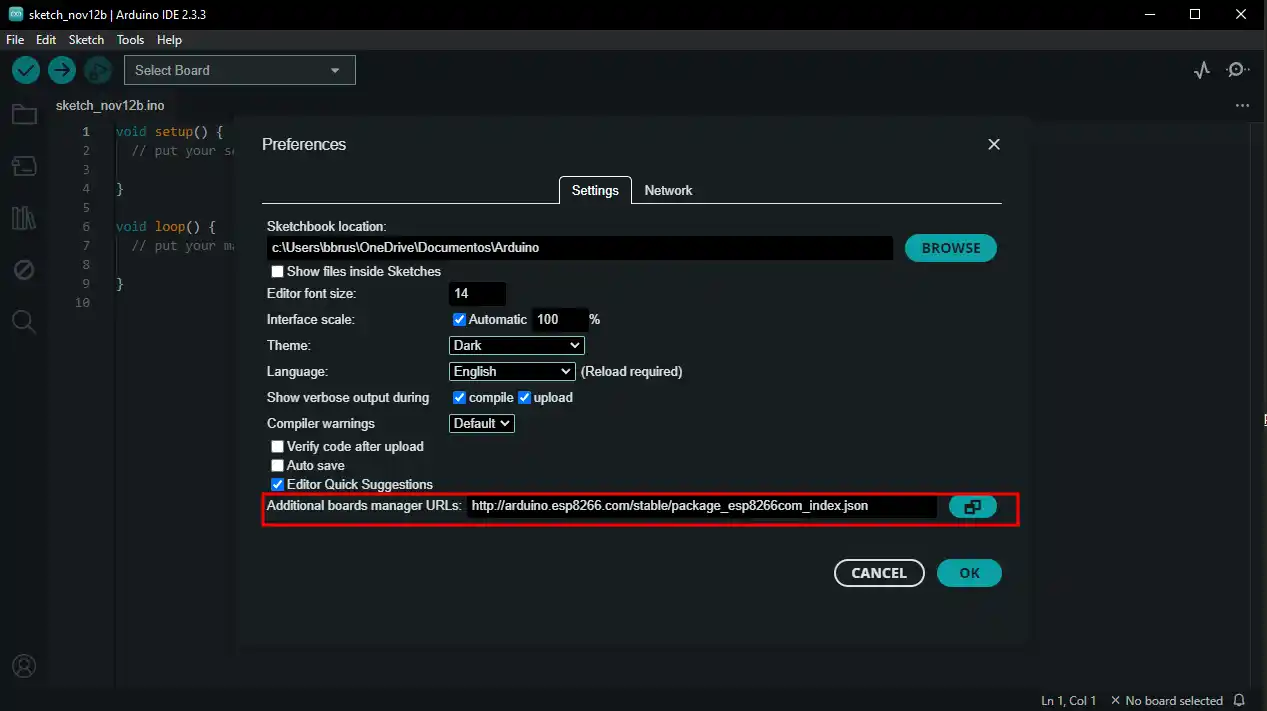
Insert the URL below at Additional Boards Manager URL’s.
http://arduino.esp8266.com/stable/package_esp8266com_index.json
Arduino IDE will download the ESP8266 boards information. Then you’ll be able to select it from the Boards menu.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
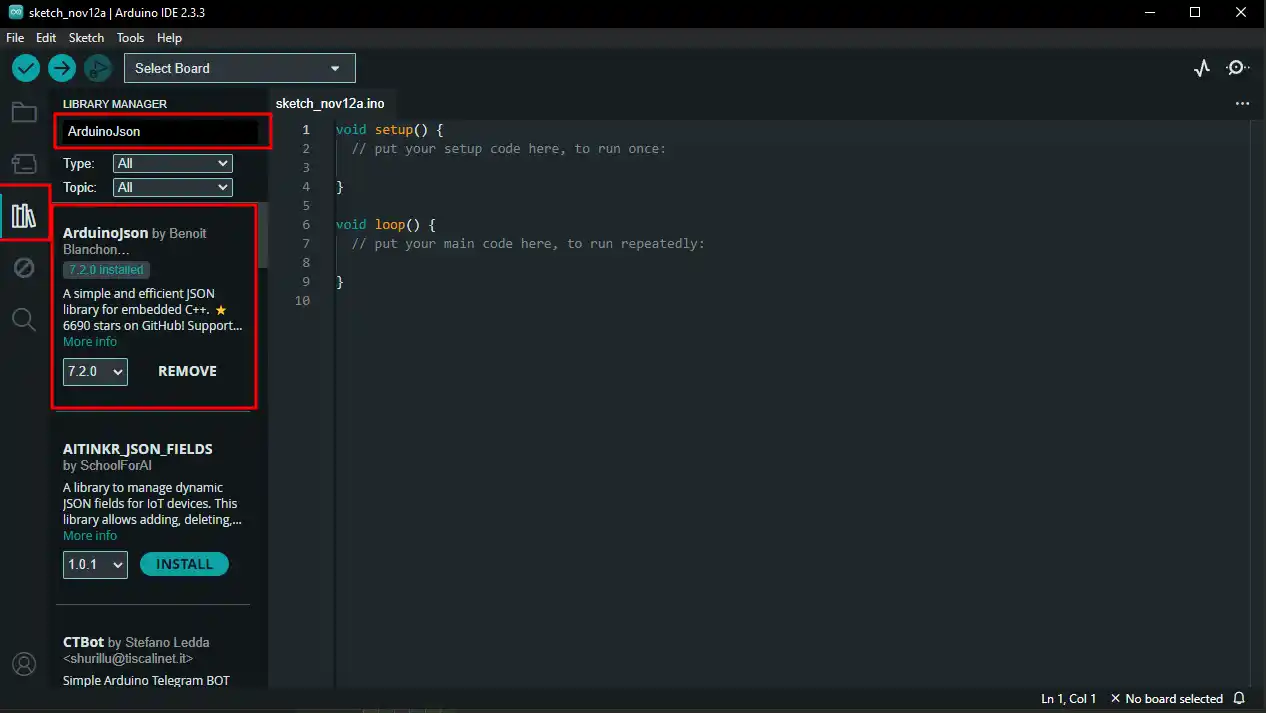
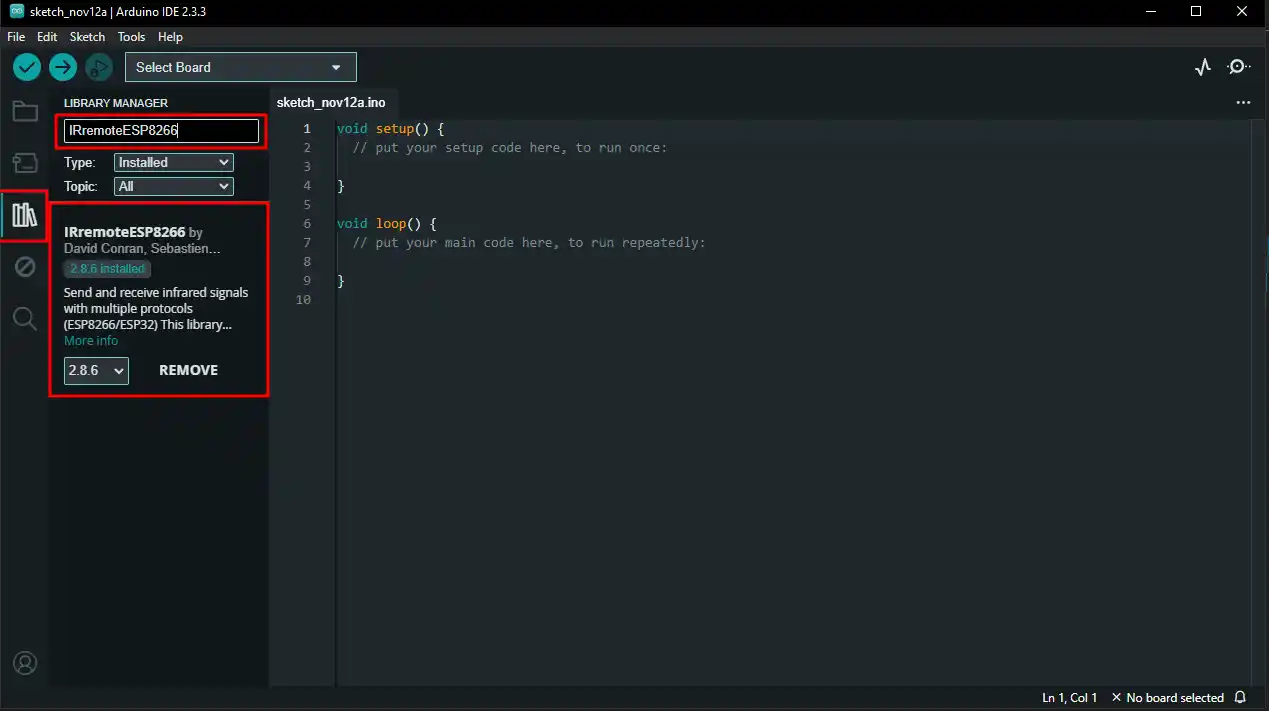
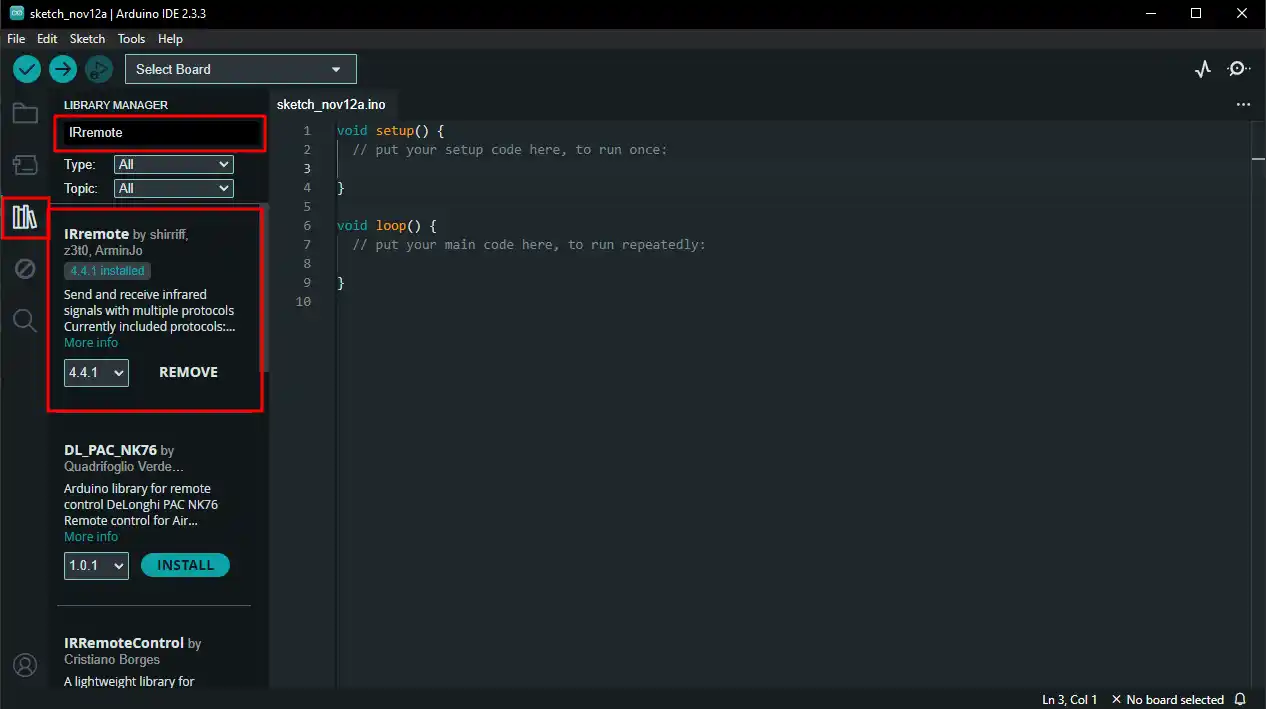
Step4: Install the necessary libraries on the Arduino IDE
Download these libraries and install them on your Arduino libraries folder.
If you don’t know how, see this guide.
You can search and install IRremote, IRremoteESP8266 and ArduinoJson directly on the Arduino libraries tab.
The others you must download and install. Restart Arduino IDE after.
{kind=link}
{kind=link}
{kind=link}
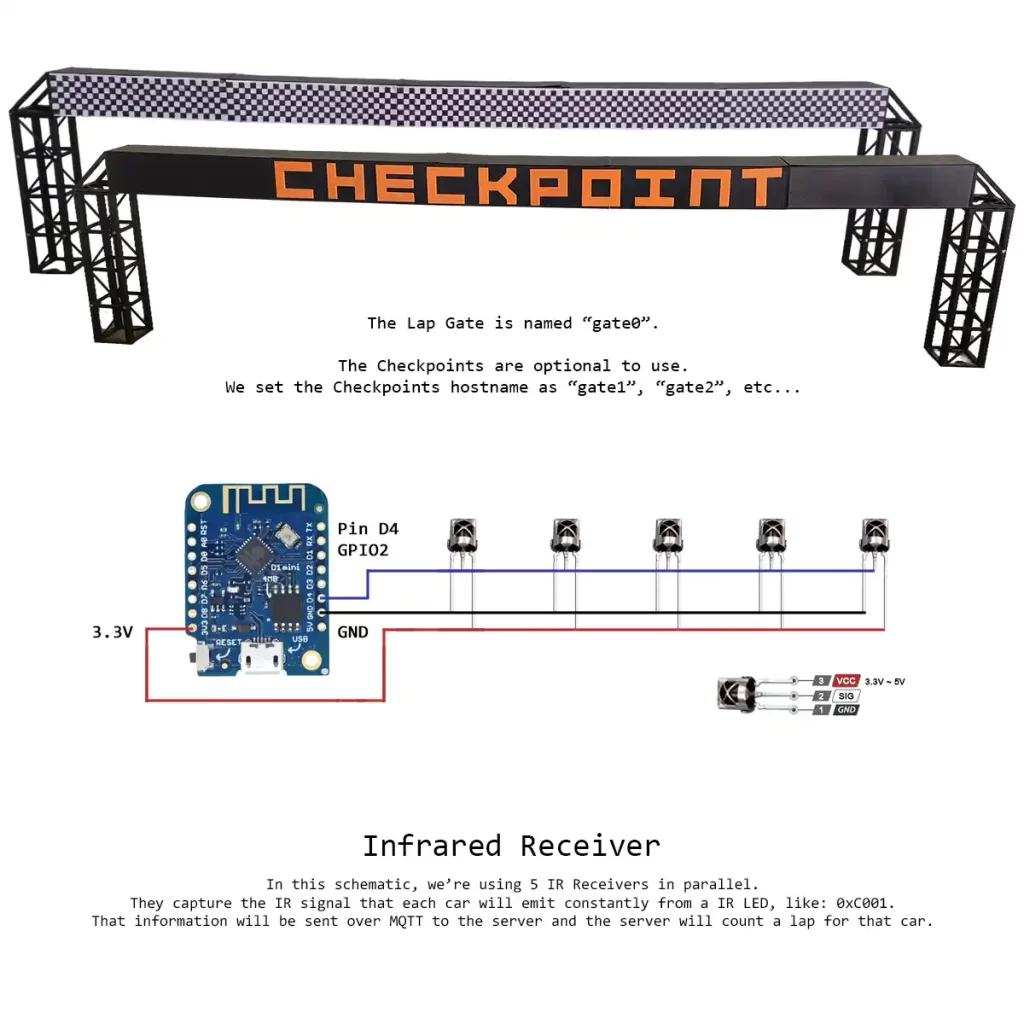
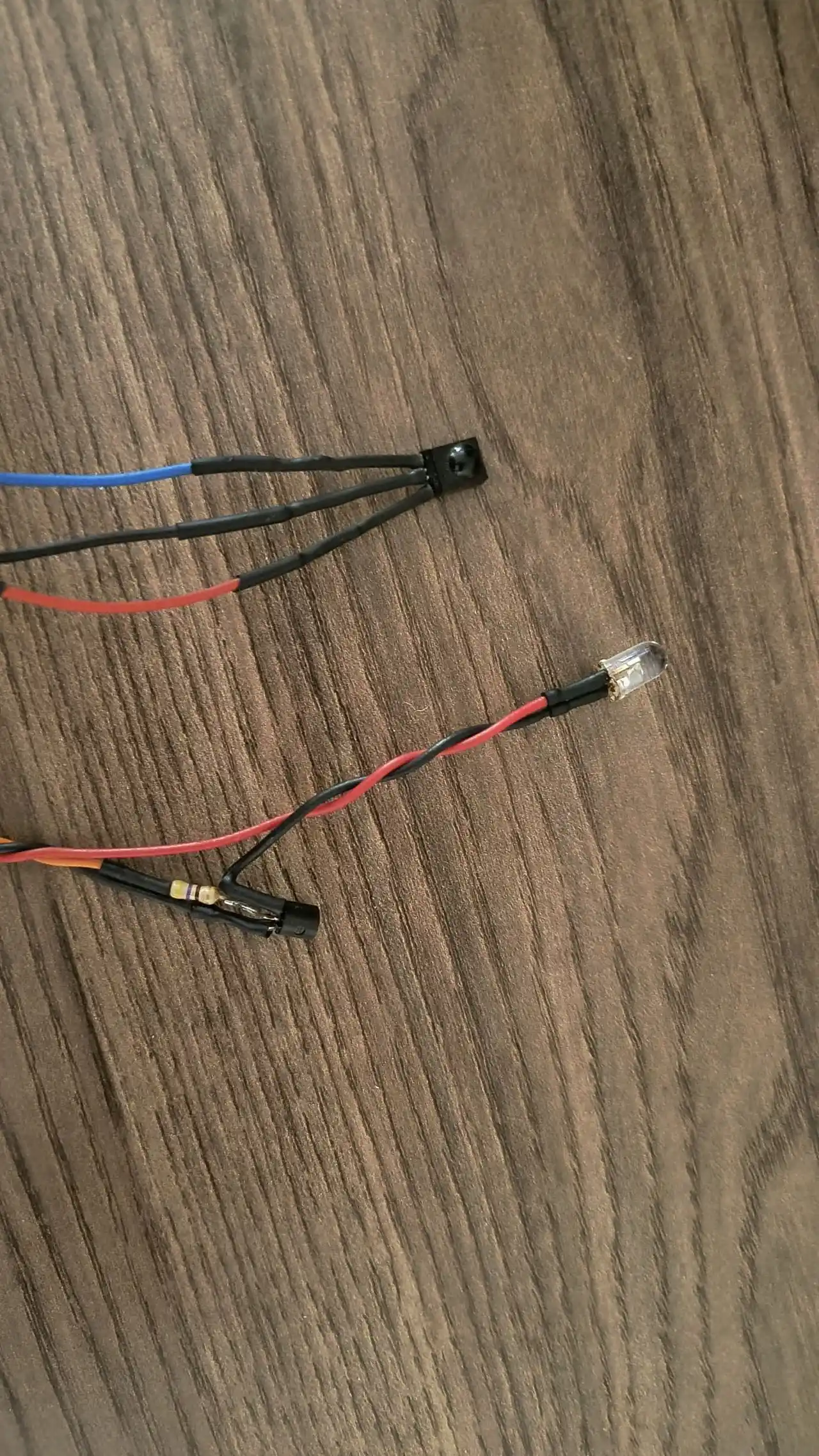
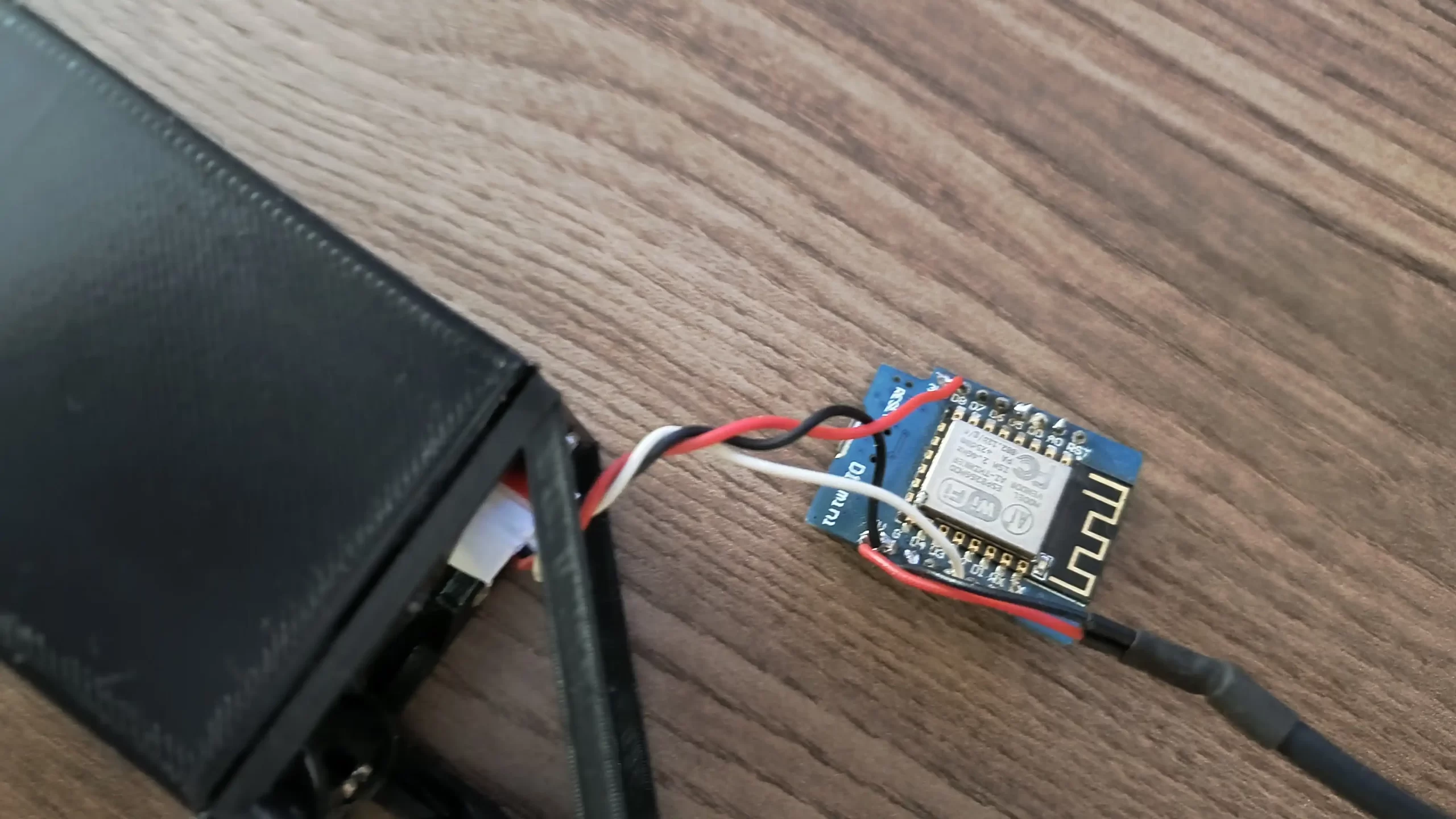
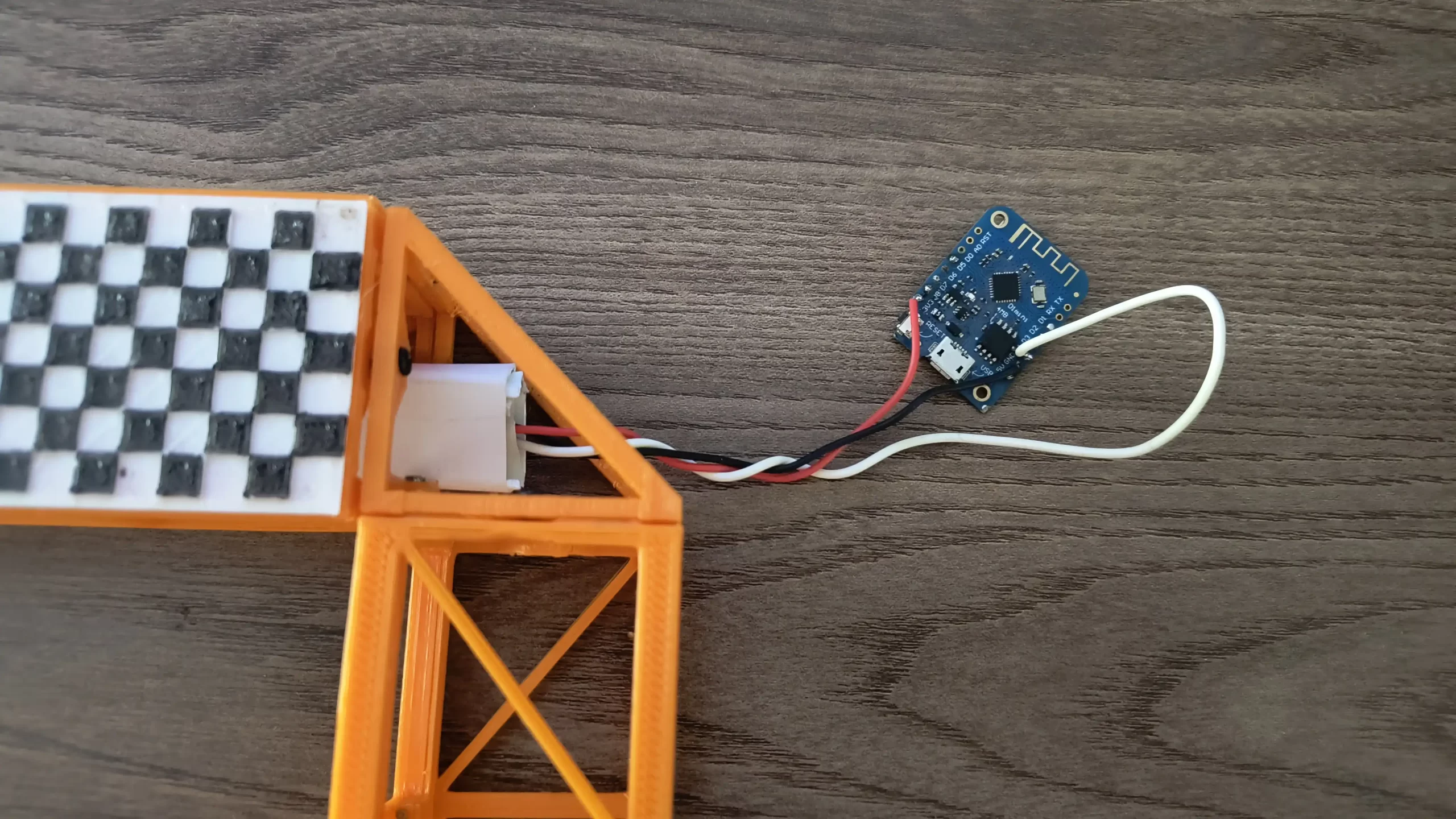
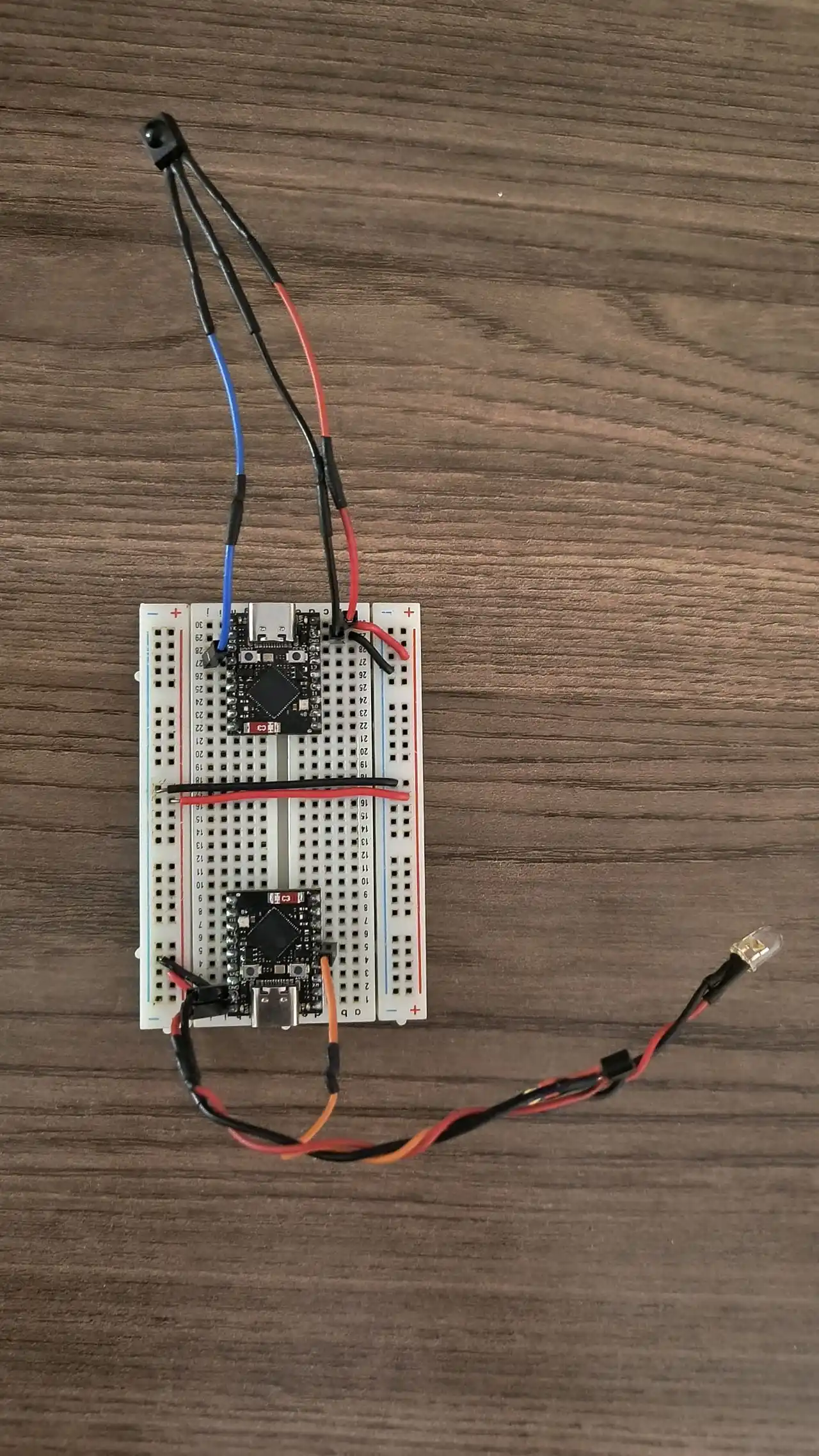
Step5: Wiring the IR Receiver
You can see that I used a different IR receiver for the breadboard (what i had on hand). However both receivers here work the same way. Use either one (most other receivers work the same way too). Also similar NPN transistors also can be used.
{kind=link}
{kind=link}
Step6: Upload the test code for the IR Receiver
Upload this code to your wemos board to see what values your remote control sends on the Serial Console.
Press the numbers on your remote and write down your codes. You’ll need them in the next step.
You can use any remote control for this.
// See full instrucions here:
// https://racegame.com.br/build-the-lap-counter-gate
#include <IRremoteESP8266.h>
#include <IRrecv.h>
// VCC -> Wemos 3.3v
// GND -> Wemos Ground
// IR -> PIN D2, GPIO4
IRrecv irrecv(2); // For the newer Wemos version use pin D4 GPIO 2
// IRrecv irrecv(4); // For the older Wemos version use pin D2 GPIO 4
decode_results results;
void setup() {
Serial.begin(115200);
irrecv.enableIRIn();
}
void loop() {
if (irrecv.decode(&results)) {
Serial.println(results.value, HEX);
Serial.print("\n");
irrecv.resume();
}
}
Write down your remote control codes
Step7: Configure your remote control commands
Now you’ll replace these codes below on the final code with your values to make testing easier.
Instead of using the car to pass by the gate, you can just point the remote to count a lap or checkpoint.
The button number 1 on the remote gives me the code: 0x20DF8877. Which i associated with car1.

my remote
switch (results.value) {
// LG Remote Control IR codes for numbers: 1234567890
// Replace the codes to match your remote control.
// It's easier to use the remote for testing.
case 0x20DF8877: car = "car1"; break;
case 0x20DF48B7: car = "car2"; break;
case 0x20DFC837: car = "car3"; break;
case 0x20DF28D7: car = "car4"; break;
case 0x20DFA857: car = "car5"; break;
case 0x20DF6897: car = "car6"; break;
case 0x20DFE817: car = "car7"; break;
case 0x20DF18E7: car = "car8"; break;
case 0x20DF9867: car = "car9"; break;
case 0x20DF08F7: car = "car10"; break;
}
Step8: Upload the final code for the IR Receiver
Make sure to change the values of the highlighted lines:
- Change the remote control codes to your remote’s codes.
- Update your Wi-Fi network SSID and Password.
- Select the MQTT Broker hostname. (See how to configure a local MQTT Broker here)
- Change the gate number if it’s Lap or Chekpoint.
// See full instrucions here:
// https://racegame.com.br/build-the-lap-counter-gate
#include "Arduino.h"
#include <ESP8266WiFi.h>
#include <Ticker.h>
#include <AsyncMqttClient.h>
#include <IRremoteESP8266.h>
#include <IRrecv.h>
#include <ArduinoJson.h>
JsonDocument obj;
// ----------------------------------------------------------------------------
// Infrared Receiver handling
// ----------------------------------------------------------------------------
// VCC -> Wemos 3.3v
// GND -> Wemos Ground
// IR -> PIN D2, GPIO4
IRrecv irrecv(2); // For the newer Wemos version use pin D4 GPIO 2
// IRrecv irrecv(4); // For the older Wemos version use pin D2 GPIO 4
decode_results results;
void receiverReadIR() {
if (irrecv.decode(&results)) {
if (results.value >= 0xC000 && results.value <= 0xC010) {
switch (results.value) {
// The IR codes can be made up.
// Here i used "C" for car then 001, to be able to expand to 999 cars.
// The IR emitter on the cars must emit this same code.
case 0xC001: car = "car1"; break;
case 0xC002: car = "car2"; break;
case 0xC003: car = "car3"; break;
case 0xC004: car = "car4"; break;
case 0xC005: car = "car5"; break;
case 0xC006: car = "car6"; break;
case 0xC007: car = "car7"; break;
case 0xC008: car = "car8"; break;
case 0xC009: car = "car9"; break;
case 0xC010: car = "car10"; break;
}
} else if (results.value >= 0x20DF0000 && results.value <= 0x20DFFFFF) {
switch (results.value) {
// LG REMOTE CONTROL IR CODES FOR TESTING = Numbers: 1234567890
// Replace the codes to match your remote control. It's easier to use the remote for testing.
case 0x20DF8877: car = "car1"; break;
case 0x20DF48B7: car = "car2"; break;
case 0x20DFC837: car = "car3"; break;
case 0x20DF28D7: car = "car4"; break;
case 0x20DFA857: car = "car5"; break;
case 0x20DF6897: car = "car6"; break;
case 0x20DFE817: car = "car7"; break;
case 0x20DF18E7: car = "car8"; break;
case 0x20DF9867: car = "car9"; break;
case 0x20DF08F7: car = "car10"; break;
}
}
// Serial.println(results.value, HEX);
// Serial.print("\n");
if (car != "") {
String str_payload = String("{\"") + String(myHostname) + String("\":\"") + String(car) + String("\"}");
str_payload.toCharArray(sendPayload, 32);
mqttClient.publish(topicGate, 0, true, sendPayload);
Serial.print("[IR]: ");
Serial.print(results.value, HEX);
Serial.printf(" [T]: %s [P]: %s\n\n", topicGate, car );
car = "";
}
// wait before being able to send the message again if the car is the same to avoid miscounting laps
// unsigned long now = millis();
// nowCar = car;
// if (nowCar != lastCar && car != "") {
// mqttClient.publish(topicGate, 0, true, sendPayload);
// Serial.printf("[T]: %s [M]: %s\n", topicGate, sendPayload);
// lastCar = nowCar;
// lastMsg = now;
// car = "";
// } else if (now - lastMsg > 2000 && car != "") {
// mqttClient.publish(topicGate, 0, true, sendPayload);
// Serial.printf("[T2]: %s [M2]: %s\n", topicGate, sendPayload);
// lastMsg = now;
// }
irrecv.resume();
}
}
// ----------------------------------------------------------------------------
// Wi-Fi handling
// ----------------------------------------------------------------------------
#define WIFI_SSID "YOUR_WIFI_SSID"
#define WIFI_PASSWORD "YOUR_WIFI_PASSWORD"
WiFiEventHandler wifiConnectHandler;
WiFiEventHandler wifiDisconnectHandler;
Ticker wifiReconnectTimer;
void connectToWifi() {
Serial.println("Connecting to Wi-Fi...");
WiFi.begin(WIFI_SSID, WIFI_PASSWORD);
WiFi.setHostname(myHostname);
Serial.println("\nWiFi Connected!");
Serial.println("------------------------------------------------------------");
Serial.print("SSID: ");
Serial.println(ssid);
Serial.print("IP Address: ");
Serial.println(WiFi.localIP());
Serial.print("Hostname: ");
Serial.println(WiFi.getHostname());
Serial.print("MAC Address: ");
Serial.println(WiFi.macAddress());
Serial.print("WiFi channel: ");
Serial.println(WiFi.channel());
Serial.println("------------------------------------------------------------\n");
}
void onWifiConnect(const WiFiEventStationModeGotIP& event) {
Serial.println("Connected to Wi-Fi.");
connectToMqtt();
}
void onWifiDisconnect(const WiFiEventStationModeDisconnected& event) {
Serial.println("Disconnected from Wi-Fi.");
mqttReconnectTimer.detach(); // ensure we don't reconnect to MQTT while reconnecting to Wi-Fi
wifiReconnectTimer.once(2, connectToWifi);
}
// ----------------------------------------------------------------------------
// MQTT handling
// ----------------------------------------------------------------------------
// You can test with an online MQTT server if you don't have your local server setup yet.
// Uncomment one below and comment the raceserver.local
// #define MQTT_HOST "test.mosquitto.org"
// #define MQTT_HOST "mqtt-dashboard.com"
#define MQTT_HOST "raceserver.local"
#define MQTT_PORT 1883
char *topicOnline = "online/check"; // { on : check } Reply { on : gateX }
char *topicRace = "race/events";
char sendPayload[32];
// 0 is the lap gate. Checkpoint gates are 1, 2, 3, etc...
// Change the hostname and topic numbers for each gate
char *myHostname = "gate0";
char *topicGate = "gate/0";
// char *topicGate = "gate/1";
// char *topicGate = "gate/2";
// char *topicGate = "gate/3";
// Messages for when the gate connects and disconnects to the server
String on = String("{\"") + String(myHostname) + String("\":\"on\"}"); // { on : gateX }
String off = String("{\"") + String(myHostname) + String("\":\"off\"}"); // { off : gateX }
const char* connectMsg = on.c_str();
const char* lastWillMsg = off.c_str();
// Add a little delay to avoid sending repeat messages for each car
const int passedGateDelay = 2000;
const char* car = "";
const char* nowCar = "";
const char* lastCar = "";
unsigned long lastMsg = 0;
AsyncMqttClient mqttClient;
Ticker mqttReconnectTimer;
void connectToMqtt() {
Serial.println("Connecting to MQTT...");
mqttClient.connect();
}
// MQTT has three QoS (quality of service) options:
// 0 (at most once delivery),
// 1 (at least once delivery),
// 2 (exactly-once delivery).
void onMqttConnect(bool sessionPresent) {
mqttClient.subscribe(topicRace, 2);
Serial.printf("Subscribed to: %s\n", topicRace);
mqttClient.publish(topicOnline, 1, true, connectMsg);
Serial.printf("Published to topic: %s [Payload]: %s\n", topicOnline, connectMsg);
}
void onMqttDisconnect(AsyncMqttClientDisconnectReason reason) {
Serial.println("Disconnected from MQTT");
if (WiFi.isConnected()) {
mqttReconnectTimer.once(2, connectToMqtt);
}
}
void onMqttMessage(char* topic, char* payload, AsyncMqttClientMessageProperties properties, size_t len, size_t index, size_t total) {
Serial.printf(" [Topic]: %s [Payload]: %s\n", topic, payload );
deserializeJson(obj, payload);
if (topic == topicRace){
if (obj["on"] == "check"){
// do something
}
}
// reply if the server asks who's online
if (topic == topicOnline){
if (obj["on"] == "check"){
mqttClient.publish(topicOnline, 1, true, connectMsg);
Serial.printf("Replied to topic: %s [Payload]: %s\n", topicOnline, connectMsg);
}
}
}
// ----------------------------------------------------------------------------
// Initialization
// ----------------------------------------------------------------------------
void setup() {
Serial.begin(115200);
irrecv.enableIRIn();
connectToWifi();
wifiConnectHandler = WiFi.onStationModeGotIP(onWifiConnect);
wifiDisconnectHandler = WiFi.onStationModeDisconnected(onWifiDisconnect);
mqttClient.onConnect(onMqttConnect);
mqttClient.onDisconnect(onMqttDisconnect);
mqttClient.onMessage(onMqttMessage);
mqttClient.setServer(MQTT_HOST, MQTT_PORT);
Serial.printf("Connected to MQTT broker: %s:%s\n", MQTT_HOST, MQTT_PORT);
}
void loop() {
receiverReadIR();
}
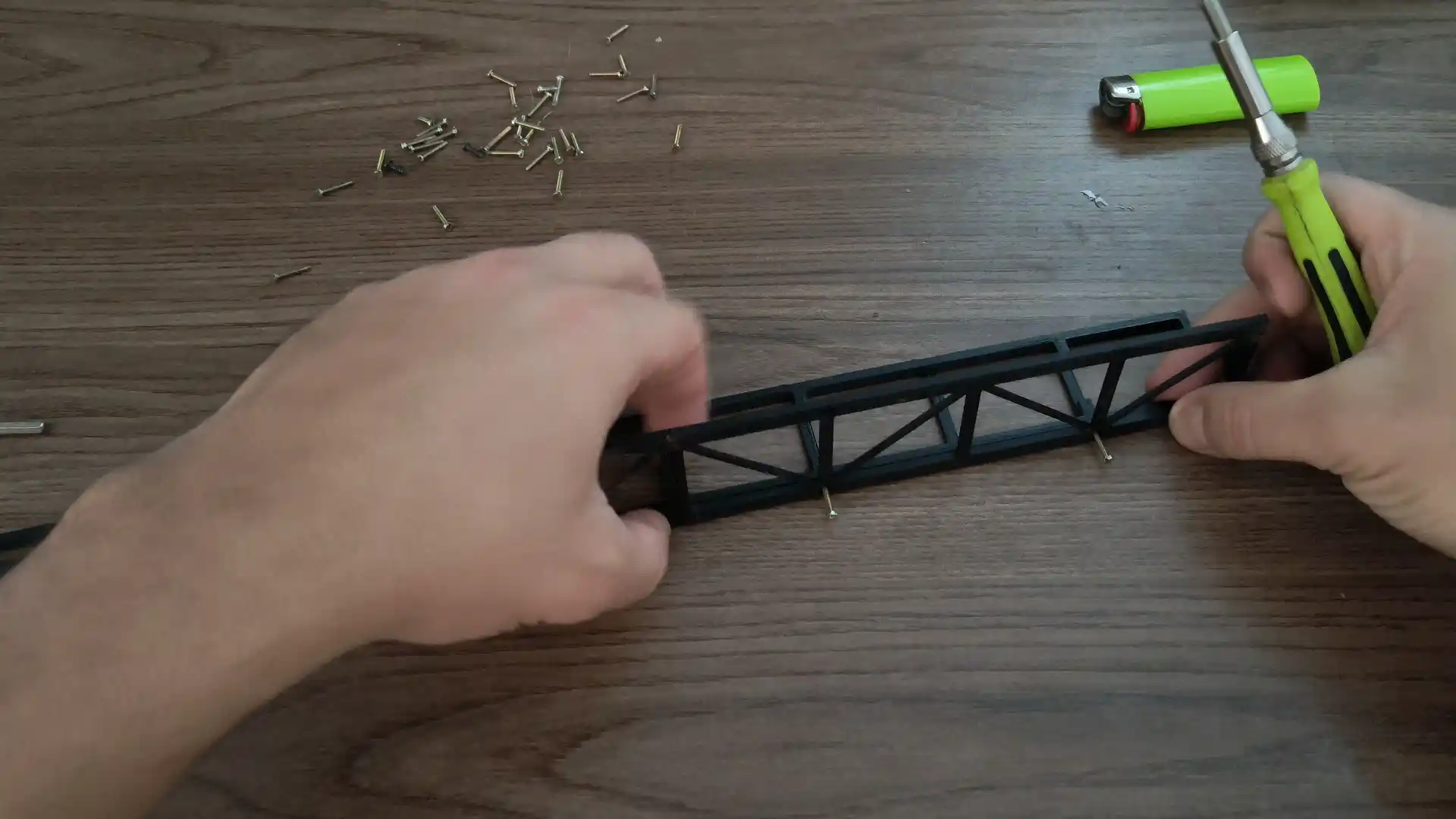
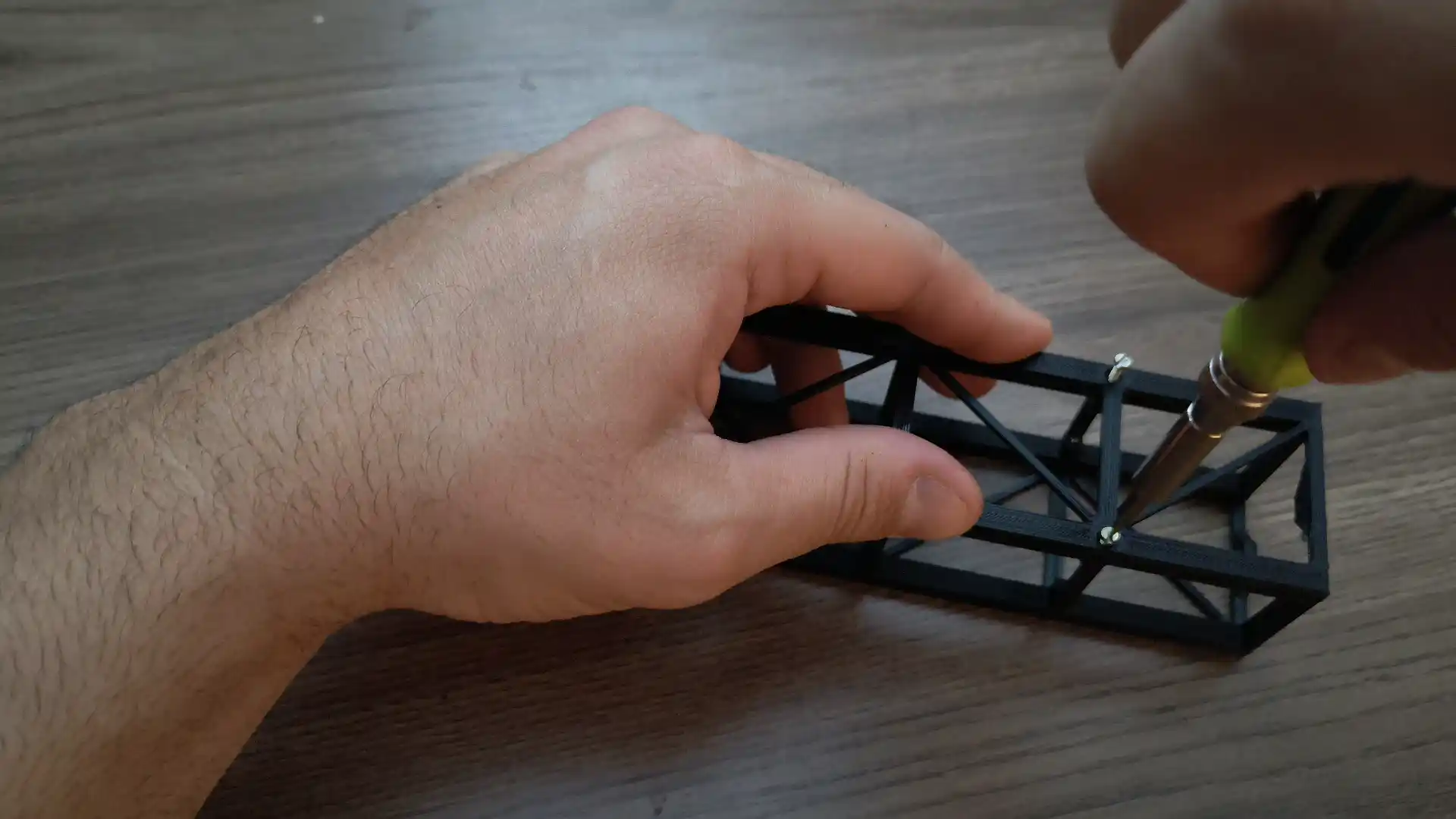
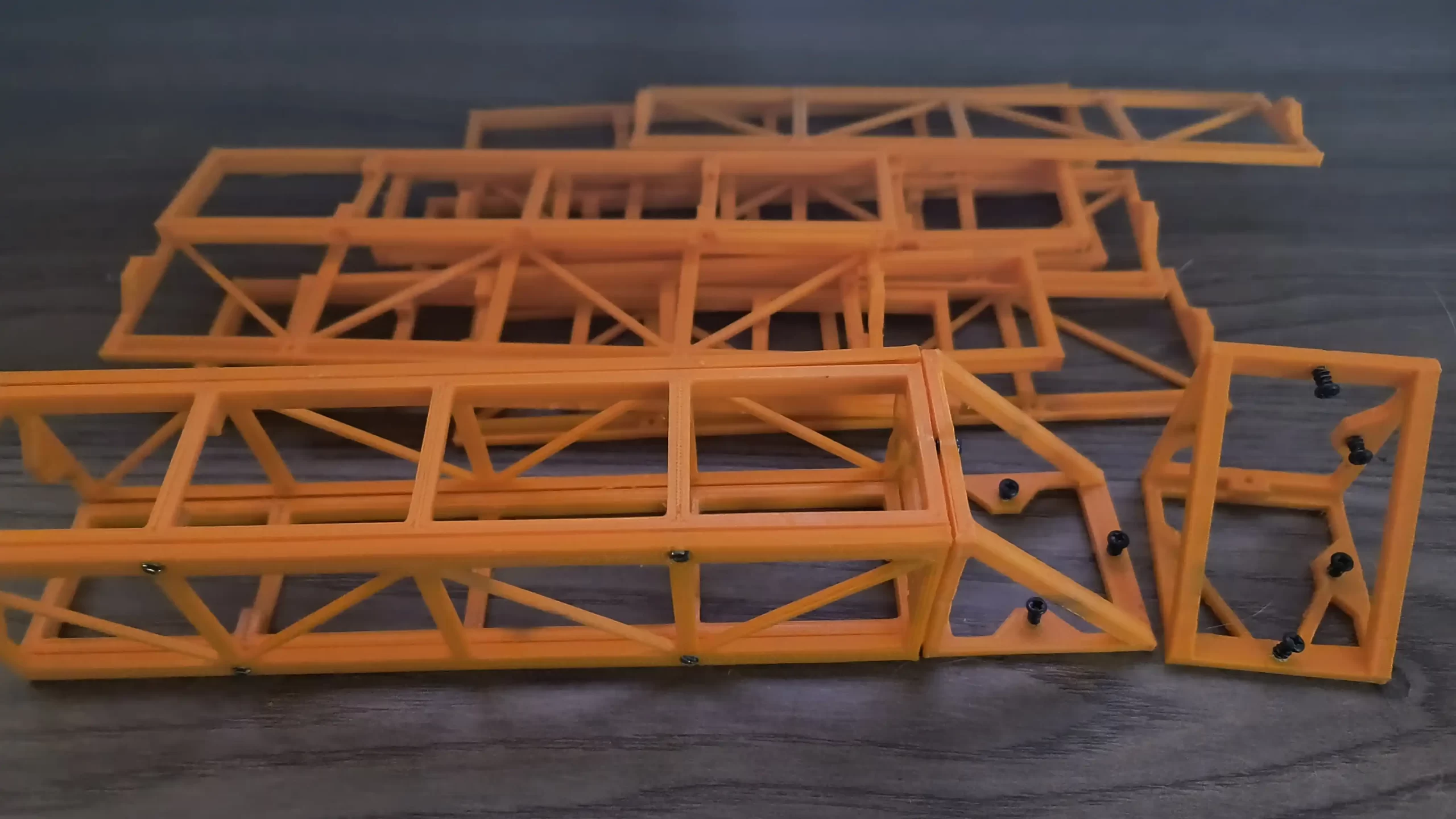
Step9: Assemble the 3D Printed gates
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Pro Tips:
- Screw all the 5x top-bottom horizontally between each other first. After you can’t fit the screwdriver.
- Add all screws to the corners to make it easier after.
- Pay attention to the orientation of the parts or you may mount them upside down.
- Heat up the screws and soften the plastic with a lighter to make the screws easier to fit.
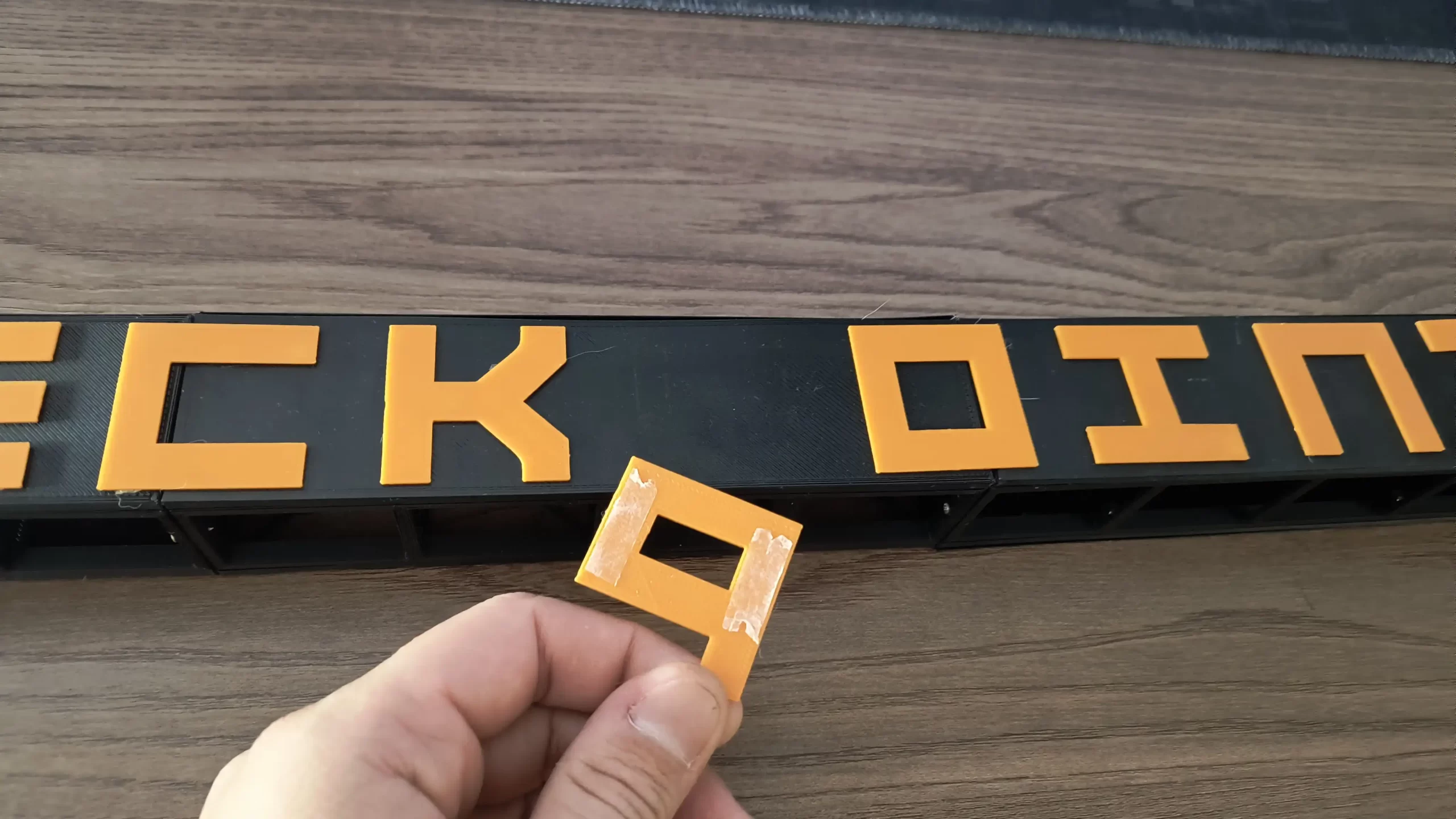
- I used double-sided tape to attach the side and top-cover and the letters for checkpoint.
You can use glue if you want it to be more permanent, but if you drop the gate and it breaks it’s easier to replace the parts if it’s just tape. - I also used a PVC channel to hold all the IR sensors. Because if you need to give maintenance, just remove the whole thing and replace the sensor needed.
- Sunlight can influence the IR receiver signals. The side panels and the PVC channel for the sensors help improve the sensor readings by blocking some of the light around the sensors.
- Use zip-ties or the adhesive tape on the PVC channel to attach it to the top side of the gate.
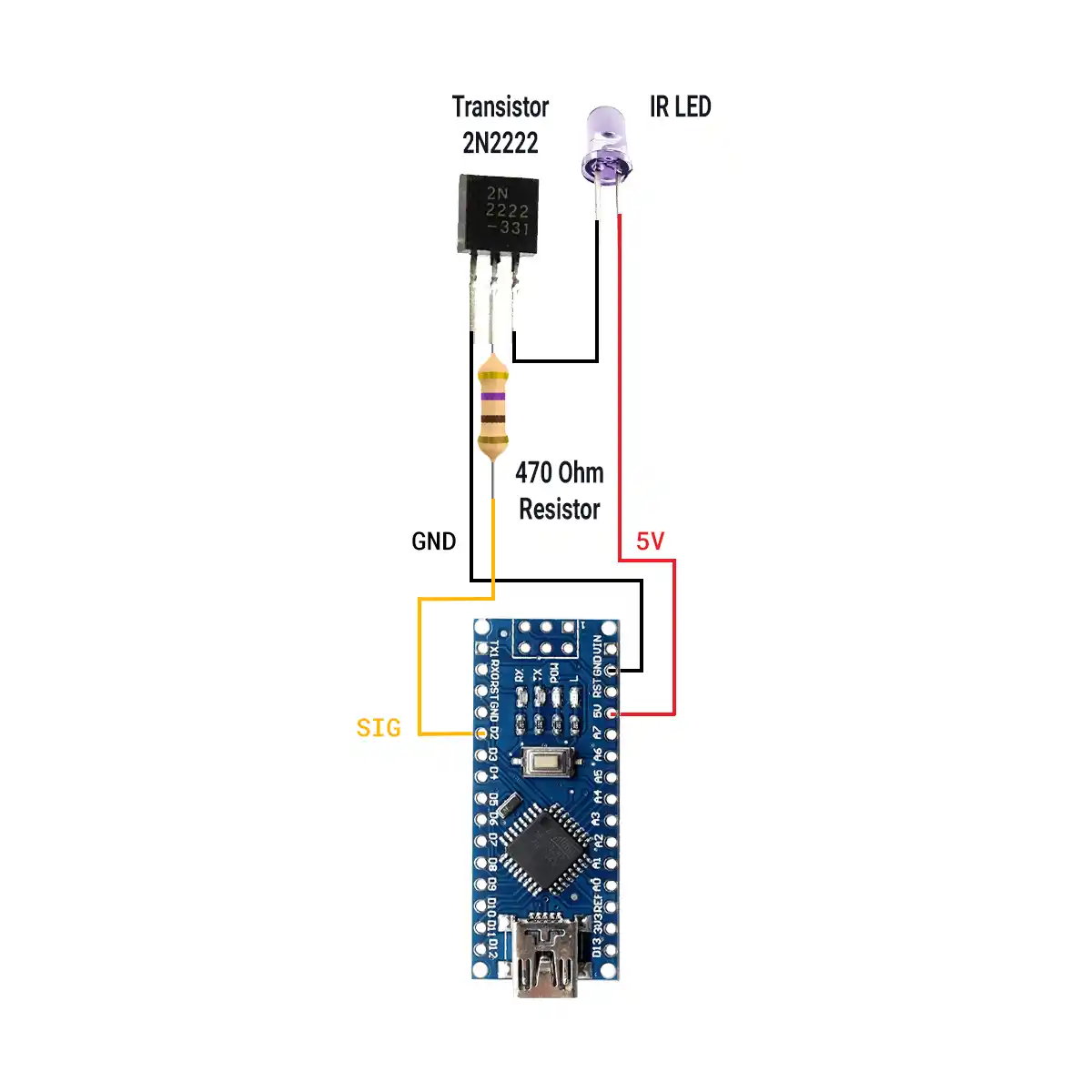
Step10: Wiring the IR LED to send IR Signals
I used an Arduino nano here because i had many available, but other boards can be used too. I have been trying to remove this board and wire the IR LED directly to the ESP32 that controls the RC Car and make use of the dual processors to control the car and this LED but the ESP32 IR Library requires an older version of the ESP32 board, and when i switch, other libraries fail. So we need to wait for an update.
{kind=link}
{kind=link}
Step11: Upload the code for the IR Transmitter
Make sure to change the remote control codes to match the car you’re going to use.
IR_transmitter.ino
#include <Arduino.h>
#include "PinDefinitionsAndMore.h" // Define macros for input and output pin etc.
#include <IRremote.hpp>
// default IR_SEND_PIN for ESP32-S3 is pin 3
// default IR_SEND_PIN for ESP32-C6 is pin 3
// default IR_SEND_PIN for Arduino nano is pin 3
#define DELAY_AFTER_SEND 20
uint16_t sAddress = 0x0102;
uint8_t sRepeats = 0;
uint8_t sCommand = 0x11; // car1
// uint8_t sCommand = 0x12;
// uint8_t sCommand = 0x13;
// uint8_t sCommand = 0x14;
// uint8_t sCommand = 0x15;
// uint8_t sCommand = 0x16;
// uint8_t sCommand = 0x17;
// uint8_t sCommand = 0x18;
// uint8_t sCommand = 0x19;
// uint8_t sCommand = 0x10; // car10
void setup() {
Serial.begin(115200);
IrSender.begin(); // Start with IR_SEND_PIN -which is defined in PinDefinitionsAndMore.h- as send pin and enable feedback LED at default feedback LED pin
IrSender.enableIROut(38); // Call it with 38 kHz just to initialize the values printed below
disableLEDFeedbackForSend();
}
void loop() {
IrSender.sendNEC(sAddress, sCommand, sRepeats);
delay(DELAY_AFTER_SEND); // delay must be greater than 5 ms (RECORD_GAP_MICROS), otherwise the receiver sees it as one long signal
}
PinDefinitionsAndMore.h
/*
* PinDefinitionsAndMore.h
*
* Contains pin definitions for IRremote examples for various platforms
* as well as definitions for feedback LED and tone() and includes
*
* Copyright (C) 2021-2023 Armin Joachimsmeyer
* armin.joachimsmeyer@gmail.com
*
* This file is part of IRremote https://github.com/Arduino-IRremote/Arduino-IRremote.
*
* Arduino-IRremote is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
* See the GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <http://www.gnu.org/licenses/gpl.html>.
*
*/
/*
* Pin mapping table for different platforms
*
* Platform IR input IR output Tone Core/Pin schema
* --------------------------------------------------------------
* DEFAULT/AVR 2 3 4 Arduino
* ATtinyX5 0|PB0 4|PB4 3|PB3 ATTinyCore
* ATtiny167 3|PA3 2|PA2 7|PA7 ATTinyCore
* ATtiny167 9|PA3 8|PA2 5|PA7 Digispark original core
* ATtiny84 |PB2 |PA4 |PA3 ATTinyCore
* ATtiny88 3|PD3 4|PD4 9|PB1 ATTinyCore
* ATtiny3217 18|PA1 19|PA2 20|PA3 MegaTinyCore
* ATtiny1604 2 3|PA5 %
* ATtiny816 14|PA1 16|PA3 1|PA5 MegaTinyCore
* ATtiny1614 8|PA1 10|PA3 1|PA5 MegaTinyCore
* SAMD21 3 4 5
* ESP8266 14|D5 12|D6 %
* ESP32 15 4 27
* ESP32-C3 2 3 4
* BluePill PA6 PA7 PA3
* APOLLO3 11 12 5
* RP2040 3|GPIO15 4|GPIO16 5|GPIO17
*/
//#define _IR_MEASURE_TIMING // For debugging purposes.
#if defined(__AVR__)
#if defined(__AVR_ATtiny25__) || defined(__AVR_ATtiny45__) || defined(__AVR_ATtiny85__) // Digispark board. For use with ATTinyCore.
#include "ATtinySerialOut.hpp" // TX is at pin 2 - Available as Arduino library "ATtinySerialOut". Saves 700 bytes program memory and 70 bytes RAM for ATtinyCore.
#define IR_RECEIVE_PIN PIN_PB0
#define IR_SEND_PIN PIN_PB4 // Pin 2 is serial output with ATtinySerialOut. Pin 1 is internal LED and Pin3 is USB+ with pullup on Digispark board.
#define TONE_PIN PIN_PB3
#define _IR_TIMING_TEST_PIN PIN_PB3
# elif defined(__AVR_ATtiny87__) || defined(__AVR_ATtiny167__) // Digispark pro board
#include "ATtinySerialOut.hpp" // Available as Arduino library "ATtinySerialOut"
// For ATtiny167 Pins PB6 and PA3 are usable as interrupt source.
# if defined(ARDUINO_AVR_DIGISPARKPRO)
// For use with Digispark original core
#define IR_RECEIVE_PIN 9 // PA3 - on Digispark board labeled as pin 9
//#define IR_RECEIVE_PIN 14 // PB6 / INT0 is connected to USB+ on DigisparkPro boards
#define IR_SEND_PIN 8 // PA2 - on Digispark board labeled as pin 8
#define TONE_PIN 5 // PA7 - on Digispark board labeled as pin 5
#define _IR_TIMING_TEST_PIN 10 // PA4
# else
// For use with ATTinyCore
#define IR_RECEIVE_PIN PIN_PA3 // On Digispark board labeled as pin 9 - INT0 is connected to USB+ on DigisparkPro boards
#define IR_SEND_PIN PIN_PA2 // On Digispark board labeled as pin 8
#define TONE_PIN PIN_PA7 // On Digispark board labeled as pin 5
# endif
# elif defined(__AVR_ATtiny84__) // For use with ATTinyCore
#include "ATtinySerialOut.hpp" // Available as Arduino library "ATtinySerialOut". Saves 128 bytes program memory.
#define IR_RECEIVE_PIN PIN_PB2 // INT0
#define IR_SEND_PIN PIN_PA4
#define TONE_PIN PIN_PA3
#define _IR_TIMING_TEST_PIN PIN_PA5
# elif defined(__AVR_ATtiny88__) // MH-ET Tiny88 board. For use with ATTinyCore.
#include "ATtinySerialOut.hpp" // Available as Arduino library "ATtinySerialOut". Saves 128 bytes program memory.
// Pin 6 is TX, pin 7 is RX
#define IR_RECEIVE_PIN PIN_PD3 // 3 - INT1
#define IR_SEND_PIN PIN_PD4 // 4
#define TONE_PIN PIN_PB1 // 9
#define _IR_TIMING_TEST_PIN PIN_PB0 // 8
# elif defined(__AVR_ATtiny1616__) || defined(__AVR_ATtiny3216__) || defined(__AVR_ATtiny3217__) // For use with megaTinyCore
// Tiny Core Dev board
// https://www.tindie.com/products/xkimi/tiny-core-16-dev-board-attiny1616/ - Out of Stock
// https://www.tindie.com/products/xkimi/tiny-core-32-dev-board-attiny3217/ - Out of Stock
#define IR_RECEIVE_PIN PIN_PA1 // use 18 instead of PIN_PA1 for TinyCore32
#define IR_SEND_PIN PIN_PA2 // 19
#define TONE_PIN PIN_PA3 // 20
#define APPLICATION_PIN PIN_PA0 // 0
#undef LED_BUILTIN // No LED available on the TinyCore 32 board, take the one on the programming board which is connected to the DAC output
#define LED_BUILTIN PIN_PA6 // use 2 instead of PIN_PA6 for TinyCore32
# elif defined(__AVR_ATtiny816__) // For use with megaTinyCore
#define IR_RECEIVE_PIN PIN_PA1 // 14
#define IR_SEND_PIN PIN_PA1 // 16
#define TONE_PIN PIN_PA5 // 1
#define APPLICATION_PIN PIN_PA4 // 0
#undef LED_BUILTIN // No LED available, take the one which is connected to the DAC output
#define LED_BUILTIN PIN_PB5 // 4
# elif defined(__AVR_ATtiny1614__) // For use with megaTinyCore
#define IR_RECEIVE_PIN PIN_PA1 // 8
#define IR_SEND_PIN PIN_PA3 // 10
#define TONE_PIN PIN_PA5 // 1
#define APPLICATION_PIN PIN_PA4 // 0
# elif defined(__AVR_ATtiny1604__) // For use with megaTinyCore
#define IR_RECEIVE_PIN PIN_PA6 // 2 - To be compatible with interrupt example, pin 2 is chosen here.
#define IR_SEND_PIN PIN_PA7 // 3
#define APPLICATION_PIN PIN_PB2 // 5
#define tone(...) void() // Define as void, since TCB0_INT_vect is also used by tone()
#define noTone(a) void()
#define TONE_PIN 42 // Dummy for examples using it
# elif defined(__AVR_ATmega1284__) || defined(__AVR_ATmega1284P__) \
|| defined(__AVR_ATmega644__) || defined(__AVR_ATmega644P__) \
|| defined(__AVR_ATmega324P__) || defined(__AVR_ATmega324A__) \
|| defined(__AVR_ATmega324PA__) || defined(__AVR_ATmega164A__) \
|| defined(__AVR_ATmega164P__) || defined(__AVR_ATmega32__) \
|| defined(__AVR_ATmega16__) || defined(__AVR_ATmega8535__) \
|| defined(__AVR_ATmega64__) || defined(__AVR_ATmega128__) \
|| defined(__AVR_ATmega1281__) || defined(__AVR_ATmega2561__) \
|| defined(__AVR_ATmega8515__) || defined(__AVR_ATmega162__)
#define IR_RECEIVE_PIN 2
#define IR_SEND_PIN 13
#define TONE_PIN 4
#define APPLICATION_PIN 5
#define ALTERNATIVE_IR_FEEDBACK_LED_PIN 6 // E.g. used for examples which use LED_BUILDIN for example output.
#define _IR_TIMING_TEST_PIN 7
# else // Default as for ATmega328 like on Uno, Nano, Leonardo, Teensy 2.0 etc.
#define IR_RECEIVE_PIN 2 // To be compatible with interrupt example, pin 2 is chosen here.
#define IR_SEND_PIN 3
#define TONE_PIN 4
#define APPLICATION_PIN 5
#define ALTERNATIVE_IR_FEEDBACK_LED_PIN 6 // E.g. used for examples which use LED_BUILDIN for example output.
#define _IR_TIMING_TEST_PIN 7
# if defined(ARDUINO_AVR_PROMICRO) // Sparkfun Pro Micro is __AVR_ATmega32U4__ but has different external circuit
// We have no built in LED at pin 13 -> reuse RX LED
#undef LED_BUILTIN
#define LED_BUILTIN LED_BUILTIN_RX
# endif
# endif // defined(__AVR_ATtiny25__)...
#elif defined(ARDUINO_ARCH_RENESAS_UNO) // Uno R4
// To be compatible with Uno R3.
#define IR_RECEIVE_PIN 2
#define IR_SEND_PIN 3
#define TONE_PIN 4
#define APPLICATION_PIN 5
#define ALTERNATIVE_IR_FEEDBACK_LED_PIN 6 // E.g. used for examples which use LED_BUILDIN for example output.
#define _IR_TIMING_TEST_PIN 7
#elif defined(ESP8266)
#define FEEDBACK_LED_IS_ACTIVE_LOW // The LED on my board (D4) is active LOW
#define IR_RECEIVE_PIN 14 // D5
#define IR_SEND_PIN 12 // D6 - D4/pin 2 is internal LED
#define _IR_TIMING_TEST_PIN 2 // D4
#define APPLICATION_PIN 13 // D7
#define tone(...) void() // tone() inhibits receive timer
#define noTone(a) void()
#define TONE_PIN 42 // Dummy for examples using it#
#elif defined(ARDUINO_NOLOGO_ESP32C3_SUPER_MINI)
#define FEEDBACK_LED_IS_ACTIVE_LOW // The LED on my board (D8) is active LOW
#define IR_RECEIVE_PIN 2
#define IR_SEND_PIN 3
#define TONE_PIN 4
#define APPLICATION_PIN 10
#elif defined(CONFIG_IDF_TARGET_ESP32C3) || defined(ARDUINO_ESP32C3_DEV)
#define NO_LED_FEEDBACK_CODE // The WS2812 on pin 8 of AI-C3 board crashes if used as receive feedback LED, other I/O pins are working...
#define IR_RECEIVE_PIN 6
#define IR_SEND_PIN 7
#define TONE_PIN 10
#define APPLICATION_PIN 18
#elif defined(ESP32)
#include <Arduino.h>
// tone() is included in ESP32 core since 2.0.2
#if !defined(ESP_ARDUINO_VERSION_VAL)
#define ESP_ARDUINO_VERSION_VAL(major, minor, patch) 12345678
#endif
#if ESP_ARDUINO_VERSION <= ESP_ARDUINO_VERSION_VAL(2, 0, 2)
#define TONE_LEDC_CHANNEL 1 // Using channel 1 makes tone() independent of receiving timer -> No need to stop receiving timer.
void tone(uint8_t aPinNumber, unsigned int aFrequency){
ledcAttachPin(aPinNumber, TONE_LEDC_CHANNEL);
ledcWriteTone(TONE_LEDC_CHANNEL, aFrequency);
}
void tone(uint8_t aPinNumber, unsigned int aFrequency, unsigned long aDuration){
ledcAttachPin(aPinNumber, TONE_LEDC_CHANNEL);
ledcWriteTone(TONE_LEDC_CHANNEL, aFrequency);
delay(aDuration);
ledcWriteTone(TONE_LEDC_CHANNEL, 0);
}
void noTone(uint8_t aPinNumber){
ledcWriteTone(TONE_LEDC_CHANNEL, 0);
}
#endif // ESP_ARDUINO_VERSION <= ESP_ARDUINO_VERSION_VAL(2, 0, 2)
#define IR_RECEIVE_PIN 15 // D15
#define IR_SEND_PIN 4 // D4
#define TONE_PIN 27 // D27 25 & 26 are DAC0 and 1
#define APPLICATION_PIN 16 // RX2 pin
#elif defined(ARDUINO_ARCH_STM32) || defined(ARDUINO_ARCH_STM32F1) // BluePill
// Timer 3 blocks PA6, PA7, PB0, PB1 for use by Servo or tone()
#define IR_RECEIVE_PIN PA6
#define IR_RECEIVE_PIN_STRING "PA6"
#define IR_SEND_PIN PA7
#define IR_SEND_PIN_STRING "PA7"
#define TONE_PIN PA3
#define _IR_TIMING_TEST_PIN PA5
#define APPLICATION_PIN PA2
#define APPLICATION_PIN_STRING "PA2"
# if defined(ARDUINO_GENERIC_STM32F103C) || defined(ARDUINO_BLUEPILL_F103C8)
// BluePill LED is active low
#define FEEDBACK_LED_IS_ACTIVE_LOW
# endif
#elif defined(ARDUINO_ARCH_APOLLO3) // Sparkfun Apollo boards
#define IR_RECEIVE_PIN 11
#define IR_SEND_PIN 12
#define TONE_PIN 5
#elif defined(ARDUINO_ARCH_MBED) && defined(ARDUINO_ARCH_MBED_NANO) // Arduino Nano 33 BLE and Arduino Nano Connect layout for MBED
// Must be before ARDUINO_ARCH_RP2040, since it is the layout for the MBED core of Arduino Nano Connect
#define IR_RECEIVE_PIN 3 // GPIO15 Start with pin 3 since pin 2|GPIO25 is connected to LED on Pi pico
#define IR_SEND_PIN 4 // GPIO16
#define TONE_PIN 5
#define APPLICATION_PIN 6
#define ALTERNATIVE_IR_FEEDBACK_LED_PIN 7 // E.g. used for examples which use LED_BUILDIN for example output.
#define _IR_TIMING_TEST_PIN 8
#elif defined(ARDUINO_ARCH_RP2040) // Arduino Nano Connect, Pi Pico with arduino-pico core https://github.com/earlephilhower/arduino-pico
#define IR_RECEIVE_PIN 15 // GPIO15 to be compatible with the Arduino Nano RP2040 Connect (pin3)
#define IR_SEND_PIN 16 // GPIO16
#define TONE_PIN 17
#define APPLICATION_PIN 18
#define ALTERNATIVE_IR_FEEDBACK_LED_PIN 19 // E.g. used for examples which use LED_BUILDIN for example output.
#define _IR_TIMING_TEST_PIN 20
// If you program the Nano RP2040 Connect with this core, then you must redefine LED_BUILTIN
// and use the external reset with 1 kOhm to ground to enter UF2 mode
#undef LED_BUILTIN
#define LED_BUILTIN 6
#elif defined(PARTICLE) // !!!UNTESTED!!!
#define IR_RECEIVE_PIN A4
#define IR_SEND_PIN A5 // Particle supports multiple pins
#define LED_BUILTIN D7
/*
* 4 times the same (default) layout for easy adaption in the future
*/
#elif defined(TEENSYDUINO) // Teensy 2.0 is handled at default for ATmega328 like on Uno, Nano, Leonardo etc.
#define IR_RECEIVE_PIN 2
#define IR_SEND_PIN 3
#define TONE_PIN 4
#define APPLICATION_PIN 5
#define ALTERNATIVE_IR_FEEDBACK_LED_PIN 6 // E.g. used for examples which use LED_BUILDIN for example output.
#define _IR_TIMING_TEST_PIN 7
#elif defined(ARDUINO_ARCH_MBED) // Arduino Nano 33 BLE
#define IR_RECEIVE_PIN 2
#define IR_SEND_PIN 3
#define TONE_PIN 4
#define APPLICATION_PIN 5
#define ALTERNATIVE_IR_FEEDBACK_LED_PIN 6 // E.g. used for examples which use LED_BUILDIN for example output.
#define _IR_TIMING_TEST_PIN 7
#elif defined(ARDUINO_ARCH_SAMD) || defined(ARDUINO_ARCH_SAM)
#define IR_RECEIVE_PIN 2
#define IR_SEND_PIN 3
#define TONE_PIN 4
#define APPLICATION_PIN 5
#define ALTERNATIVE_IR_FEEDBACK_LED_PIN 6 // E.g. used for examples which use LED_BUILDIN for example output.
#define _IR_TIMING_TEST_PIN 7
#if !defined(ARDUINO_SAMD_ADAFRUIT) && !defined(ARDUINO_SEEED_XIAO_M0)
// On the Zero and others we switch explicitly to SerialUSB
#define Serial SerialUSB
#endif
// Definitions for the Chinese SAMD21 M0-Mini clone, which has no led connected to D13/PA17.
// Attention!!! D2 and D4 are swapped on these boards!!!
// If you connect the LED, it is on pin 24/PB11. In this case activate the next two lines.
//#undef LED_BUILTIN
//#define LED_BUILTIN 24 // PB11
// As an alternative you can choose pin 25, it is the RX-LED pin (PB03), but active low.In this case activate the next 3 lines.
//#undef LED_BUILTIN
//#define LED_BUILTIN 25 // PB03
//#define FEEDBACK_LED_IS_ACTIVE_LOW // The RX LED on the M0-Mini is active LOW
#elif defined (NRF51) // BBC micro:bit
#define IR_RECEIVE_PIN 2
#define IR_SEND_PIN 3
#define APPLICATION_PIN 1
#define _IR_TIMING_TEST_PIN 4
#define tone(...) void() // no tone() available
#define noTone(a) void()
#define TONE_PIN 42 // Dummy for examples using it
#else
#warning Board / CPU is not detected using pre-processor symbols -> using default values, which may not fit. Please extend PinDefinitionsAndMore.h.
// Default valued for unidentified boards
#define IR_RECEIVE_PIN 2
#define IR_SEND_PIN 3
#define TONE_PIN 4
#define APPLICATION_PIN 5
#define ALTERNATIVE_IR_FEEDBACK_LED_PIN 6 // E.g. used for examples which use LED_BUILDIN for example output.
#define _IR_TIMING_TEST_PIN 7
#endif // defined(ESP8266)
#if defined(ESP32) || defined(ARDUINO_ARCH_RP2040) || defined(PARTICLE) || defined(ARDUINO_ARCH_MBED)
#define SEND_PWM_BY_TIMER // We do not have pin restrictions for this CPU's, so lets use the hardware PWM for send carrier signal generation
#else
# if defined(SEND_PWM_BY_TIMER)
#undef IR_SEND_PIN // SendPin is determined by timer! This avoids warnings in IRremote.hpp and IRTimer.hpp
# endif
#endif
#if !defined (FLASHEND)
#define FLASHEND 0xFFFF // Dummy value for platforms where FLASHEND is not defined
#endif
/*
* Helper macro for getting a macro definition as string
*/
#if !defined(STR_HELPER)
#define STR_HELPER(x) #x
#define STR(x) STR_HELPER(x)
#endif
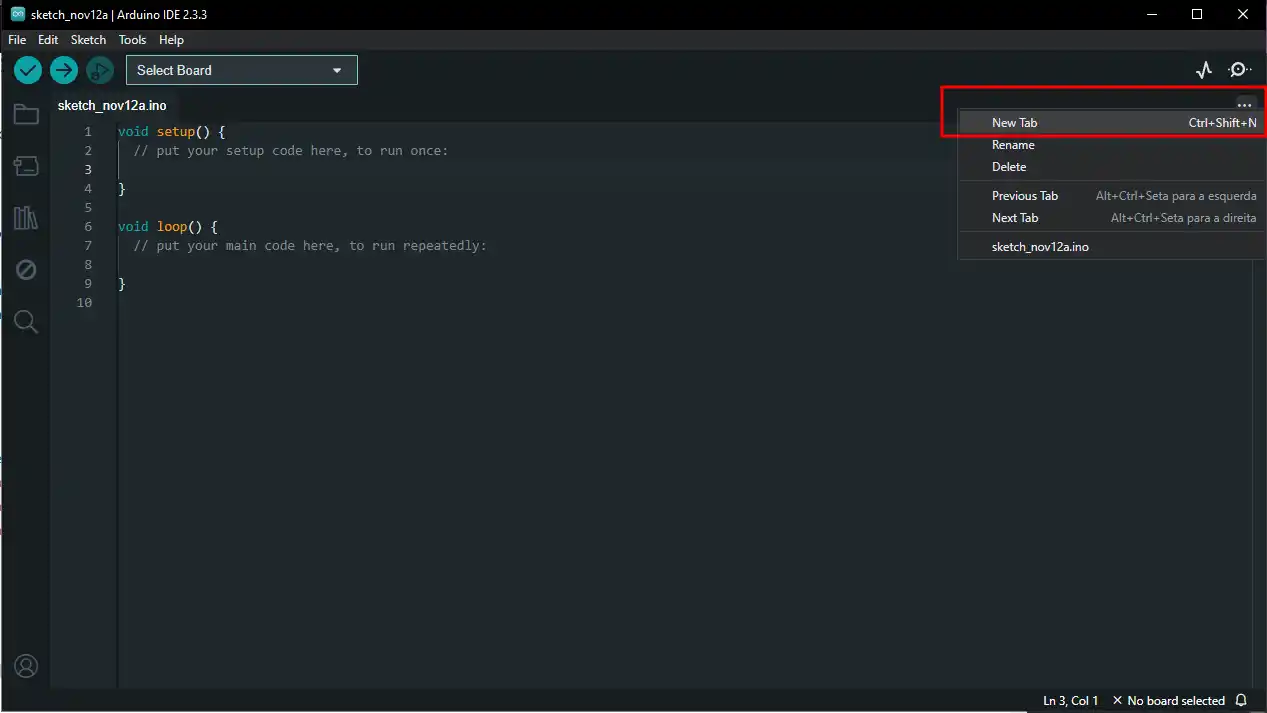
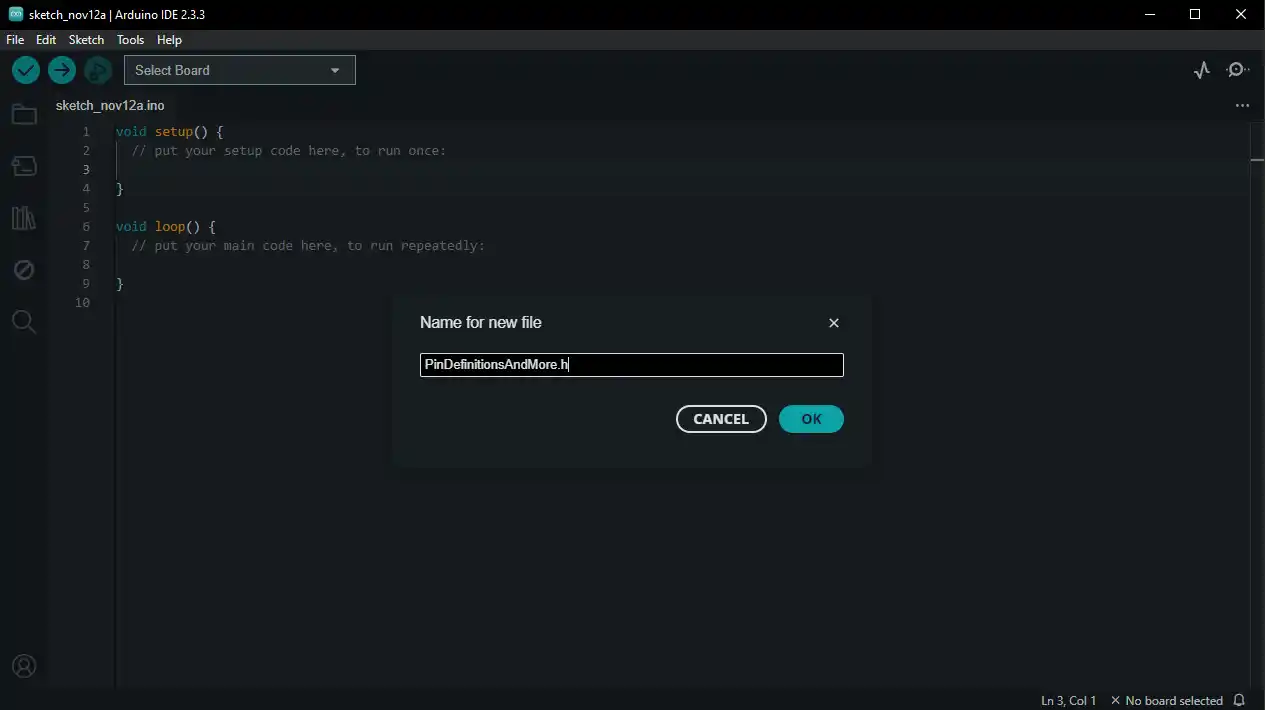
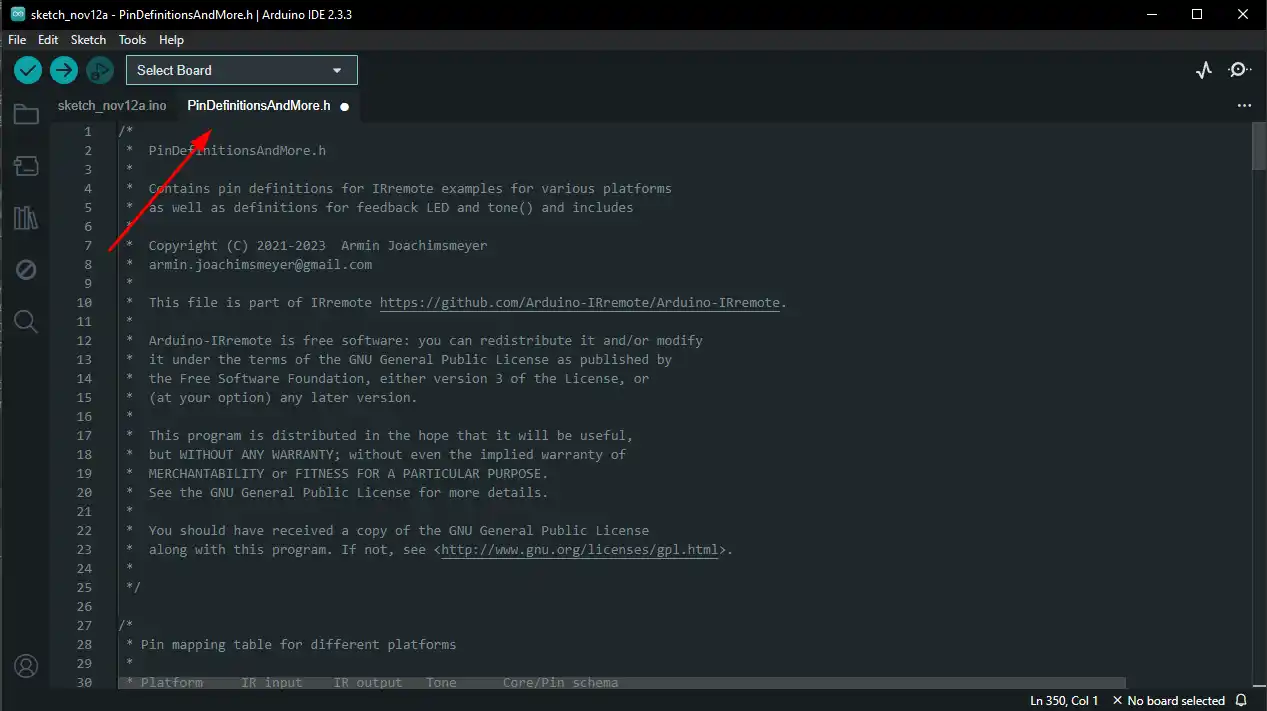
For the PinDefinitionsAndMore.h you have to create a new tab and paste the code above to upload the IR_transponder.ino because the new version of the IRRemote library requires this file now.
{kind=link}
{kind=link}
{kind=link}
Now you can put the IR transmitter on your car and it will count a lap when you pass through the gate.
See how i did it for my car over here.
You can check if the IR LED is working correctly by opening your phone camera to see the LED blinking.